Игнатьев В.В.
Таганрогский
технологический институт Южного федерального университета, Россия
Синтез систем гибридного управления
на основе объединения классической и нечеткой моделей объекта
Важнейшей современной
задачей при разработке автоматических систем управления является повышение
эффективности управления технологическими объектами. При этом, повышению
оперативности управления и качества регулирования препятствуют два основных
фактора: нестабильность параметров объекта управления в процессе работы и постоянно
изменяющиеся требования к качеству регулирования. В настоящее время для решения
таких задач управления интенсивно применяются интеллектуализированные гибридные
системы, позволяющие одновременно использовать преимущества традиционных
средств управления и методов искусственного интеллекта.
Рассматриваемая в работе интеллектуализированная
гибридная система управления, определяется законом трансформации, при котором
новая структура знаний системы порождается на базе предыдущей. В этом
представлении гибридную систему необходимо рассматривать как систему обработки
и взаимодействия данных, состоящую их двух уровней.
Иллюстрация двухуровневой системы обработки и
взаимодействия данных приведена на рис. 1.
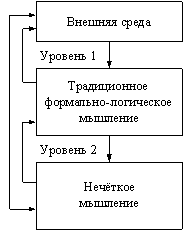
Рис. 1 – Двухуровневая система обработки и
взаимодействия данных
Первый уровень представлен традиционным
формально – логическим мышлением и основан на методах классической теории
управления. На втором уровне используется нечёткое моделирование,
представленное посредством реализации управления на основе нечёткой логики, с
целью получения качественного управляющего воздействия на объект при изменении
его параметров и позволяющее в совокупности с полученными результатами первого
уровня исследовать различные аспекты неопределённости.
Двухуровневое позиционирование позволяет
рассматривать общую структуру системы обработки данных с различных точек
зрения, при этом взаимодействие элементов (компонентов) структуры носит не
только механический или электрический характер, но и информационный, что
является важным атрибутом современных организационно-технических систем.
Проведенный анализ разработок гибридных систем
управления позволяет сделать вывод о том, что применяемые в рамках гибридных
систем модели реализуются отдельно, в зависимости от поставленной цели. В
частности, гибридная система, основанная на совместном использовании
классического и нечеткого регуляторов, представлена в виде блок-схемы на
рис. 2.
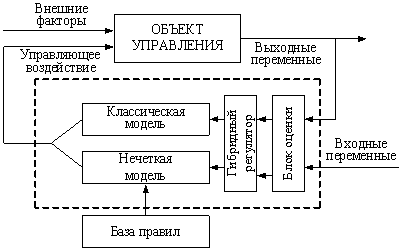
Рис. 2 – Блок-схема гибридной системы управления
Такое представление имеет ряд недостатков.
Нечеткие системы по сравнению с традиционными системами имеют лучшие
помехозащищенность, быстродействие и точность за счет более адекватного
описания среды функционирования и способны в определенный момент дополнить
и / или заменить их. Однако, нестабильность и большой объем
контролируемых и регулируемых параметров приводит к снижению качества
регулирования даже при использовании нечеткой системы. Основным фактором,
влияющим на качество регулирования, является то, что формирование базы правил
(базы знаний) для нечеткого регулятора происходит экспертным путем. При этом
необходимо учитывать компетентность и профессионализм эксперта в
рассматриваемой области.
Для преодоления таких недостатков предлагается использовать
знания (данные), полученные при реализации классического алгоритма управления и
использование их для формирования базы правил при синтезе и моделировании
нечёткой модели. Таким образом, гибридная система может быть представлена в
виде блок-схемы на рис. 3.
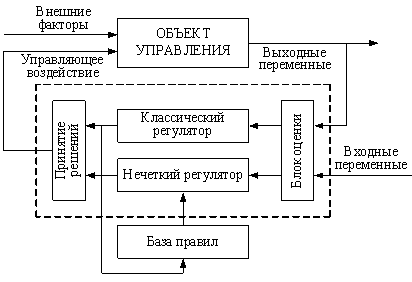
Рис. 3 – Блок-схема гибридной системы управления
В качестве таковых знаний могут быть
использованы следующие переменные: отклонение системы q; скорость изменения
отклонения ![]() ; интеграл отклонения òθdt;
ускорение отклонения
; интеграл отклонения òθdt;
ускорение отклонения ![]() . В зависимости от выбранных переменных и
разработанных алгоритмов взаимодействия моделей формируется требуемое
управляющее воздействие U
на объект.
. В зависимости от выбранных переменных и
разработанных алгоритмов взаимодействия моделей формируется требуемое
управляющее воздействие U
на объект.