К. т. н., доц. Бондаренко Л. М., Проскурня В. М,
Черкудінов В. Е.
Дніпропетровський національний університет залізничного
транспорту
імені академіка В. Лазаряна
Опір руху при
пересуванні вантажів на котках
При
переміщенні важких вантажів на невеликі відстані застосовуються котки (рис. 1).
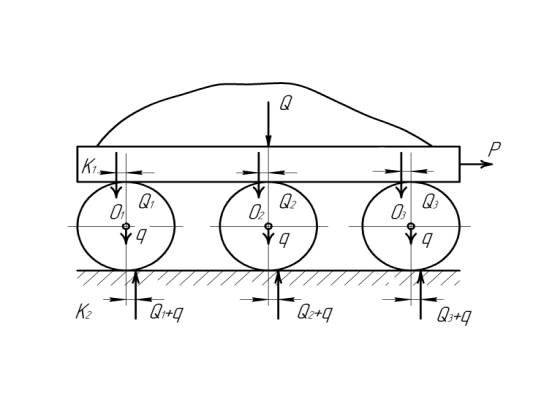
Рис.
1. Схема до визначення опору руху по котках
Вантаж
поміщується на платформі, а між платформою і опорною поверхнею розташовують
котки.
Якщо Q
– вага платформи і вантажу; q – вага котка; P – рушійна сила; ![]() - вага вантажу, що діє на перший
коток;
- вага вантажу, що діє на перший
коток; ![]() - відповідно на другий коток;
- відповідно на другий коток; ![]() – вага вантажу, що
діє на третій коток і т. д.
– вага вантажу, що
діє на третій коток і т. д.
Рушійна сила
при подоланні опору першого котка визначається із виразу
 (1)
(1)
де ![]() ,
, ![]() – коефіцієнт тертя
кочення між котком і опорою та між платформою і котком відповідно.
– коефіцієнт тертя
кочення між котком і опорою та між платформою і котком відповідно.
Досить
вірогідно, що цей вираз був отриманий ще до появи (1882 р.) теорії контактних
деформацій і напружень Герца, без яких неможливо було знайти радіус котків, так
і коефіцієнт тертя кочення.
Вперше
аналітичну залежність для визначення коефіцієнта тертя кочення отримав Табор
(2), але наявність в формулах коефіцієнта гістерезисних витрат привело до того,
що вони не отримали практичного застосування. В (3) наведені формули для
визначення коефіцієнта тертя кочення при початкових точкових і лінійних контактах,
які утримують тільки загальновживані механічні контакти та розміри.
При
початковому точковому контакті
![]() , (2)
, (2)
де b – півширина плями контакту в напрямку руху; r – радіус котка в метрах.
Знайдемо
радіус котка виходячи із теорії контактних напружень Герца за умови, що модулі
пружності матеріалів однакові, а коефіцієнти Пуассона дорівнюють 0,3:
 , (3)
, (3)
де B – ширина котка; ![]() – допустимі контактні
напруження.
– допустимі контактні
напруження.
Для виразу
(1)
 ; (4)
; (4)
 .
.
Для другого
котка
![]() і т. д. (5)
і т. д. (5)
При русі
циліндра радіусом R по коткам контактні
напруження визначаються за формулою [4]
 , (6)
, (6)
де ![]() – коефіцієнт рівняння
еліпса дотику, який залежить від відношення R/r.
– коефіцієнт рівняння
еліпса дотику, який залежить від відношення R/r.
Нагадаємо, що
при початковому точковому контакті величину допустимих контактних напружень
можна прийняти в 1,3…1,4 рази більшою, ніж при лінійному [4].
Величина
півширини плями контакту при точковому контакті
 . (7)
. (7)
При
початковому точковому контакті
![]() . (8)
. (8)
При величинах
для першої задачі ![]() q = 1кН; В = 300 мм;
q = 1кН; В = 300 мм; ![]() = 400 МПа;
= 400 МПа; ![]() величина r = 39мм,
а коефіцієнти тертя кочення
величина r = 39мм,
а коефіцієнти тертя кочення ![]()
![]() і рушійна сила складе
і рушійна сила складе
![]() .
.
Для другої задачі
при тих же вагових даних і допустимому контактному напруженні між циліндром і
роликом ![]() = 600 МПа, діаметр
циліндра D = 2R = 116мм. Коефіцієнт тертя кочення циліндра (
= 600 МПа, діаметр
циліндра D = 2R = 116мм. Коефіцієнт тертя кочення циліндра (![]() =1,14)
=1,14) ![]() = 0,445 мм і рушійна сила складає
= 0,445 мм і рушійна сила складає
![]() .
.
Таким чином,
запропонована методика дозволить аналітично знайти опір пересування вантажів на
котках.
Література
1.
Кончин, Н. И. Теорія механизмов и машин [Текст] / Н. И. Кончин, М. С. Мовнин.– Л.: Судпромгиз, 1962. – 616
с.
2.
Динансон К. Механика контактного взаимодействия [Текст] / К. Динансон. – М.: Мир,
1989. – 510 с.
3.
Бондаренко Л. М. Деформаційні опори в машинах [Текст] / Л. М. Бондаренко, М. П.
Довбня, В. С. Ловейкін. – Дніпропетровськ: Дніпро-VAL, 2002. – 200 с.
4. Писаренко
Г. С. Справочник по сопротивлению материалов [Текст] /
Г. С. Писаренко, А.П. Яковлєв, В. В. Матвеев. – К.: Наукова думка, 1988. – 736 с.