Биологические науки/11. Биоинженерия и
биоинформатика
Д.т.н.,
проф. Яцун С.Ф., к.т.н., доц. Рукавицын А.Н., Чижов А.Ю.
Юго-Западный
государственный университет
Медицинская
робототехника
За последние двадцать лет робототехника
произвела огромный скачок в своем развитии, приникая во все новые и новые
области науки и техники, и область медицины не только не стала исключением, но
и, наряду со многими другими, стала флагманом робототехники.
Сегодня, существуют десятки тысяч различных робототехнических
устройств, от простейших имплантатов до сложнейших роботов-врачей. Но, несмотря
на такое обилие различных медицинских роботов, можно вполне четко определить
пять основных направлений, по которым идет разработка и производство
медицинских роботизированных устройств [1]:
1.
Разработка
дистанционно управляемых хирургических роботизированных комплексов.
2.
Разработка
мобильных роботов-помощников предназначенных для помощи медперсоналу и больным.
3.
Биопротезирование,
разработка искусственных конечностей человека.
4.
Разработка
автоматизированных средств передвижения (экзоскелетов) для людей, потерявших способность передвигаться
самостоятельно.
5. Разработка протезов внутренних органов
человека и создание медицинских нанороботов.
Первые дистанционно управляемые хирургические
роботизированные комплексы для хирургии
впервые появились в США в середине 80-х
годов XX века. С тех пор, уже было разработано огромное
множество различных робототехнических устройств, предназначенных для выполнения
различных хирургических операций. Известным робототехником и инженером,
сербским специалистом в области биомеханики и робототехники Миомиром
Вукобратовичем [2] была предложена классификация хирургических
роботов (см. рис.1).
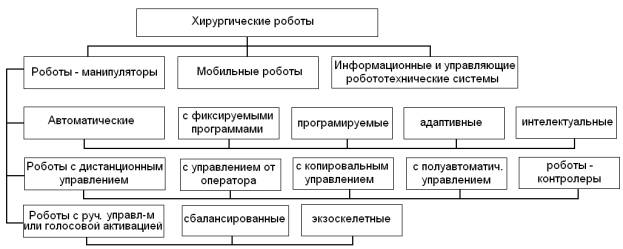
Рис.1 Классификация хирургических роботов
Несмотря на все достижения в области медицинской
робототехники полностью заменить автоматизированным устройствам врачей пока
невозможно. Поэтому сегодня достаточно
широко распространены вспомогательные медицинские роботы, способные обычной сестры
– подавать и принимать у хирурга инструменты, разносить больным по палатам лекарства,
переносить и пересаживать из кровати в кресло сложных пациентов в больницах [3].
Такие роботы обычно управляются с помощью голосовых команд, а координация их движений
обеспечивается специальной цифровой видеокамерой.
Ещё одна важная задача медицинской робототехники
– разработка автоматизированных
протезов для утраченных человеческих конечностей. В современных конструкциях
протезов человек может точно подстраивать конечность-протез под действия и
физиологические особенности своего организма.
В последнее десятилетие ведется широкомасштабная
работа над созданием экзоскелетов – специальных роботизированных костюмов,
призванных помочь людям с нарушениями опорно-двигательного аппарата и снова почувствовать себя здоровыми. Подобные
конструкции оснащаются сервоприводами, которые приводятся в действие
электрическими импульсами, вырабатываемыми мускулами и улавливаемыми
прикрепленными к коже оператора электродами (см. рис. 2). С помощью экзоскелета
инвалиды могут зажить более полноценной жизнью. Кроме того, движения с
экзоскелетом помогают устранить осложнения от нахождения длительного время в
инвалидном кресле, а также улучшить физическую форму пациентов [4,5].
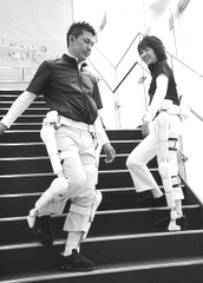
Рис.2 Экзоскелеты для реабилитации людей с
повреждениями
опорно-двигательного аппарата
Разработка медицинских нанороботов – одно из
самых перспективных направлений в роботехнике XXI века. Создание таких
устройств позволит перевести медицину, на новый, клеточный уровень. Перспективы
таких устройств просто невероятны. Согласно последним разработкам нанороботы
смогут лечить отдельные клетки человеческого организма, доставлять лекарства
непосредственно к месту их потребления, вмешиваться в процессы старения нашего
организма, производить пластические операции без внешних надрезов и вносить
изменения в структуру хромосом и ДНК [1].
На сегодняшний день сложно переоценить важность
медицинской робототехники, поскольку главной задачей медицинских роботов
является сохранение и улучшение жизни каждого конкретного человека.
За последние двадцать лет медицинская
роботехника добилась невероятного прогресса. Спустя двадцать лет после
появления первого медицинского манипулятора, спектр медицинских
автоматизированных устройств содержит уже около тысячи различных экземпляров,
призванных помочь медперсоналу и больным.
Список использованных
источников
1.
Саврасов, Г.В. Медицинская робототехника: Условия, проблемы и основные
принципы проектирования [Текст]:/Г.В. Саврасов// Биомедицинская инженерия и
технология. №2, 1998.- С. 35 – 50.
2.
Сайт «Основы робототехники» [Электронный ресурс]. - Режим доступа:
http://www.gruppa-prolif.ru/content/view/40/61/, свободный.
3.
Уварова, Н.П. Экзоскелеты: настоящее и будущее [Текст]: /Н.П. Уварова, И.А.
Яковлев, А.Н. Рукавицын// Наука и инновации – 2012: Материалы VIII Международной научно-практической конференции, Т. 16 Биологические науки,
«Nauka i studia», Прземисл, 2012. - С. 65-72
4.
Яцун, С.Ф.
Применение мехатронных систем [Текст]: Учеб. пособие/ С.Ф. Яцун, А.Н.
Рукавицын// Курск: Изд-во ЮЗГУ, 2011. -180с.
5.
Яцун,
С.Ф. Определение параметров приводов биоинженерных мехатронных модулей для
экзоскелета нижних конечностей человека [Текст]: / С.Ф. Яцун, А.Н. Рукавицын// Известия ЮЗГУ. Серия: Техника и
технологии, 2012. Ч.1 - №2 - C.196-200