Современные информационные
технологии/ 2. Вычислительная техника и программирование
Илипов М.М., к.ф.-м.н. Искакова А.С.
Евразийский национальный университет им. Л.Н.
Гумилева, Казахстан
Вероятностное представление процесса
выбора прецедента в системе Матлаб
Ранее
в работе Прохорова М. Д. и Федунова Б.Е. [1] был введен алгоритм выбора прецедента при наблюдении
ситуационного вектора с количественными координатами.
Пусть
состояние ПрС/С описывается ситуационным вектором с координатами (х1, …, xn) и каждая координата хi - лингвистическая переменная с множеством
термов прецедентам (блок прецедента). Каждая строка матрицы представляет собой
конкретный ситуационный вектор, при котором в прошлом успешно реализовался
соответствующий прецедент.
Таблица
1
№
п/п |
Координаты
ситуационного вектора
|
Прецедент
|
|||
|
x1 |
x2 |
… |
x n |
||
|
|
|
|
|
|
d1 |
|
: |
: |
: |
: |
: |
: |
|
|
|
|
|
|
dm |
Перенумеруем строки блока прецедента dj двумя индексами: первый
индекс – номер прецедента (здесь он является номером блока), второй индекс –
порядковый номер ситуационного вектора в этом блоке.
Полученную упорядоченную таким образом систему логических
высказываний называют нечёткой матрицей знаний или просто – матрицей знаний.
На основе текущих измерений точка ![]() формируется с количественными значениями его
координат. Только в этой фиксированной
точке
формируется с количественными значениями его
координат. Только в этой фиксированной
точке ![]() в
момент поступления замера и нужно определить значение функции принадлежности mdj (x1, .. xi, .. xn).
в
момент поступления замера и нужно определить значение функции принадлежности mdj (x1, .. xi, .. xn).
Допустим, что имеем
прецедент dj, который может быть получен из следующих возможных
ситуационных векторов ![]() ,
,![]() , …,
, …, ![]() .
.
Элементы множества W(d,
z)={W(d, z1), …, W(d, zμ)} являются несмещенными
оценками для вероятности ![]() , которые при j=1,
…, μ определяются как
, которые при j=1,
…, μ определяются как
Итак, имеем множество
несмещенных оценок вероятности проявлений искажений. Наиболее подходящая несмещенная оценка W(d, zg) для вероятности оправдываемости метеорологического прогноза d P(D=d)
распределения (3) определяется из всего множества полученных несмещенных
оценок W(d,
z)={W(d, z1), …, W(d, zμ)}, согласно определениям.
Решение zg, основанное на наблюдении, является наиболее подходящим из
множества z={z1, … , zm}, если
 (8)
(8)
где при i=1, … , s элементы множества W(xi, z)={ W(xi, z1), … , W(xi, zm)} являются несмещенными оценками для вероятности P(D=d) распределения (3), определенными в (7).
Несмещенная оценка W(d, zg) для вероятности P(D=d) распределения (1) является наиболее подходящей из всего множества
несмещенных W(d, z)={W(d, z1), …, W(d, zμ)}, определяемых в (7), если zg – наиболее подходящее решение, основанное на
наблюдении.
Наиболее подходящая несмещенная оценка W(u, zg) для вероятности
P(U=u) модели является состоятельной, асимптотически
нормальной и асимптотически эффективной.
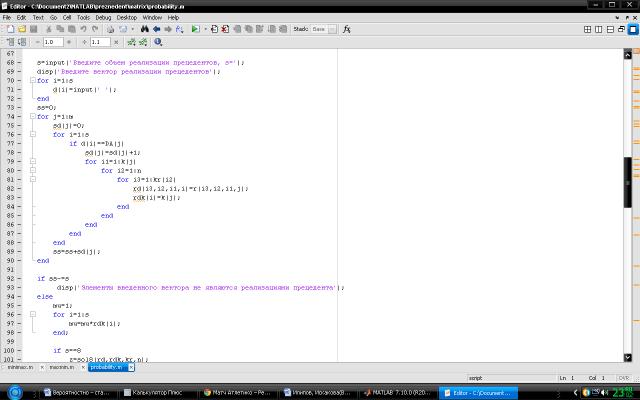
Алгоритмическое решение нахождения наиболее подходящей несмещенной
оценки в системе Матлаб представлены на рисунках 1-4.
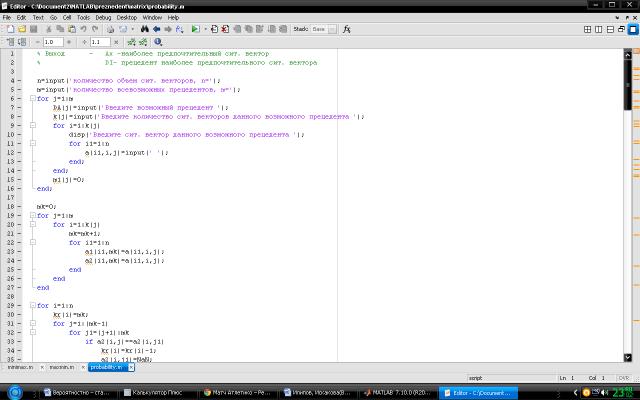 \\Рис. 1
\\Рис. 1
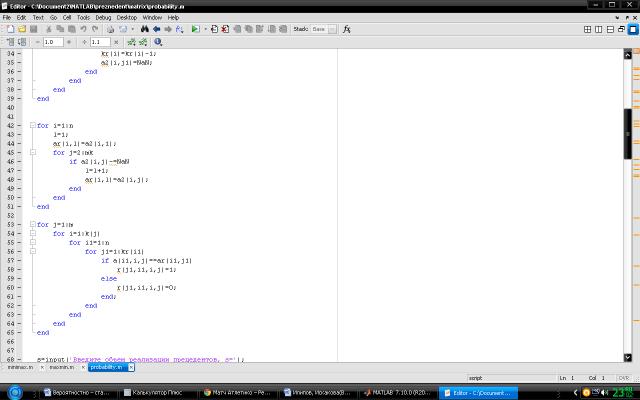
\\Рис.
2
\\Рис.3
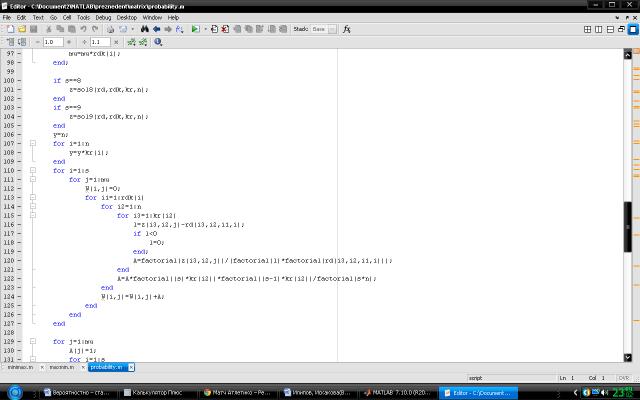
\\Рис.
4
Следует отметить, что основная часть результатов и
методов, представленные в работе, могут быть использованы в научных
исследованиях специалистами по математической статистике.
Литература:
1. Прохоров М. Д. Федунов
Б.Е. Вывод по прецеденту в базах знаний бортовых интеллектуальных систем,
размещаемых на борту антропоцентрических объектов.
2. Искакова А.С. Определение наиболее подходящей несмещенной оценки вероятности оправдываемости
прогноза в метеорологии. // Сибирский
журнал индустриальной математики. 2002 г.Том V, 1(9). С.79-84.
3. Риордан Д. Введение в
комбинаторный анализ. М. 1963. – 287 с.
4. Савельев Л.Я.
Комбинаторика и вероятность. М.: Наука. 1975.–
424с.
5. Крамер Г. Методы
математической статистики. – М. 1975. – 648 c.