Технические
науки/5. Энергетика
Эм Г.А., Молдабаева А.Е.
Карагандинский государственный технический университет,
Казахстан
Имитационное моделирование работы тиристорного электропривода горных
машин при электроснабжении от источников соизмеримой мощности
Опыт эксплуатации тиристорного
электропривода постоянного тока (ТЭП ПТ) на буровых установках, экскаваторах и
другой горнодобывающей технике показал, что на его динамические и статические
характеристики существенное влияние оказывают внутренние параметры источника
электроснабжения, линии электропередач и характеристики управляемого выпрямителя
[1, 2].
При этом
электроснабжение рассматриваемого технологического оборудования осуществляется,
как правило, от автономных и неавтономных источников мощностью, соизмеримой с
мощностью электропривода горного оборудования (установки, машины). Для таких
условий характерно значительное (до 40 %) изменение амплитуды переменного
напряжения и существенные колебания частоты питающей сети (при электроснабжении
от автономного источника), что приводит к деформации статических и динамических
характеристик электропривода, а также к ложным отключениям, связанным с
нарушением работы системы импульсно-фазового управления [3].
Для определения динамических свойств ТЭП
ПТ при электроснабжении от источников соизмеримой мощности (ИСМ) в программной
среде МIК-AL была разработана
блок-схема
программного аналога электромеханической
системы ИСМ-ТЭП ПТ.
В ходе
экспериментов имитировалось падение напряжения
в сети на 40 % вниз от номинального значения, что соответствуют реальным
условиям эксплуатации электроприводов буровых станков и других горных машин при
электроснабжении от автономных или неавтономных источников электроснабжения
мощностью, соизмеримой с мощностью электропривода. Имитационное моделирование
подтвердило выводы, полученные в [3] о снижении скорости идеального холостого
хода и жесткости механических характеристик электропривода при питании от ИСМ.
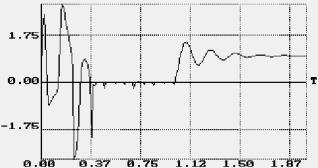
Результаты
моделирования, представленные на рисунке 1, отражают переходные процессы в ТЭП
ПТ при значении заданной скорости, соответствующей номинальному режиму в
условиях «мягкой» сети.
Как видно из графиков
тока якоря и скорости, для исследуемой системы характерными являются
автоколебательные режимы работы.
Полученные результаты
могут быть интерпретированы следующим образом.
В замкнутой по
скорости и току системе подчиненного регулирования в начальный момент пуска
из-за большого рассогласования между сигналами заданной и действительной
скорости выходной сигнал П-регулятора скорости устанавливается на уровень
ограничения, соответствующий отсечке по току.
Рисунок 1 – Осциллограммы
тока якоря и скорости электропривода в условиях «мягкой» сети
При этом на выходах
регулятора тока и управляемого выпрямителя также устанавливаются
соответствующие сигналы, обеспечивающие увеличение тока якоря до уровня
отсечки, что в условиях электроснабжения от ИСМ приводит к значительному падению напряжения в сети. С
учетом того, что инерционность ЭДС
якоря при постоянном магнитном потоке определяется инерционностью
электромеханических процессов в электроприводе и зависит от приведенного
момента инерции, а динамика падения напряжения в цепи якоря – от постоянной Тс, то
есть от инерционности электромагнитных процессов, протекающих в сети, то в
момент выполнения соотношения Uя –Uc=Eя,
вентили тиристорного выпрямителя закрываются (если точнее это произойдет
в момент достижения тока в якорной цепи значения ниже тока удержания). Силовая
электрическая цепь разрывается, ток iя падает до нуля. С исчезновением тока в цепи якоря
напряжение сети начинает превышать значение ЭДС якоря двигателя и тиристоры,
при наличии управляющего воздействия, открываются, что приводит вновь к выходу
регулятора скорости на уровень отсечки по току, далее процесс повторяется, и в
системе устанавливаются устойчивые автоколебания.
Следовательно,
несанкционированное закрытие тиристоров из-за превышения значения ЭДС якоря
двигателя над выпрямленным напряжением сети приводит к установившимся
автоколебаниям скорости и тока в
системе подчиненного регулирования.
В работе для
параметрической оптимизации был применен один из методов экспериментальной
оптимизации – метод незатухающих колебаний Циглера-Никольса [4].
В результате
параметрической оптимизации были получены следующие результаты, приведенные на
рисунке 2. Параметрическая
оптимизация, проведенная путем изменения численных значений параметров системы
регулирования, позволяет обеспечить стабилизацию тока и скорости двигателя при
приложении нагрузки и значительном понижении напряжения сети (до 20 %), однако
при этом значительно ухудшаются динамические свойства системы в пусковом режиме
(перерегулирование по скорости и току достигает 140 %), поэтому для дальнейшего
улучшения работы ТЭП ПТ при электроснабжении от ИСМ, требуется также
структурная оптимизация при заданных параметрах качества регулирования системы.
Рисунок
2 – Результаты параметрической оптимизации (переходные процессы по току якоря и
скорости при
понижении напряжения сети до 20 %)
Анализ, выполненный по результатам имитационных
экспериментов и проведенной параметрической оптимизации, показал, что для
исключения автоколебательных процессов в системе при пуске необходимо
обеспечить нелинейное изменение выходного сигнала задатчика интенсивности
скорости от минимальной величины
ускорения на начальном участке пуска с последующим его возрастанием. При этом
время разгона электропривода должно существенно превышать инерционность
электромагнитных процессов в электроприводе при его электроснабжении от ИСМ.
Таким образом, в замкнутой
по скорости и току системе подчиненного регулирования тиристорного электропривода
при питании от ИСМ повышения работоспособности привода можно добиться за счет
снижения его быстродействия и некоторого ухудшения динамических
характеристик. При этом динамика переходных процессов будет незначительно
отличаться в части быстродействия от динамики
разомкнутой системы, динамические провалы скорости при реакции на возмущающие воздействия
будут практически соответствовать этому показателю в разомкнутой системе, а в
статике будет обеспечено формирование необходимой для таких электроприводов
экскаваторной механической
характеристики.
Список
литературы
1.
Парфенов Б.М., Кожаков
О.И., Шиленков В.А. Электропривод буровых установок // Привод и управление. –
2001. – № 5. – С. 8-15.
2.
Микитченко А.Я., Шевченко А.Н., Бирюков Ю.А., Шестаков П.Р. Энергетическая
эффективность регулирования в тиристорных и транзисторных электроприводах
экскаваторов // Горное оборудование и электромеханика. –
2010. – № 5. – С. 24-31.
3.
Бырька В.Ф., Брейдо
И.В., Петерс И.В., Томилин Н.Ф. Особенности управления тиристорным
электроприводом горных машин при электроснабжении от источника энергии
соизмеримой мощности // Изв. ВУЗов. Горный журнал. – 1991. – № 9. – С. 106-109.
4.
Электротехнический
справочник. В 3 т. Т. 3: В 2 кн. Кн. 2. Использование
электрической энергии / Под общ. ред. И.Н. Орлова и др. - М.: Энергоатомиздат, 1988. –
616 с.