Адамовский
В.В., Фетисов В.С.
Уфимский государственный авиационный
технический университет, Россия
Автоматическая посадка мультикоптера
С недавних пор внимание разработчиков
БПЛА привлекают мультикоптеры (многороторные платформы) – аппараты вертолетного
типа с несколькими несущими винтами, которые имеют явные преимущества для задач мониторинга перед обычными вертолетами. Обычно задачи мониторинга включают сбор информации,
измерение некоторых параметров объекта или окрестностей локальной зоны и (или)
отображение собранных данных.
Обычно бортовой источник энергии –
аккумуляторная батарея, которая обеспечивает типичное время полета 30-40 минут,
но этого времени недостаточно для исследования объектов [1]. Зачастую требуется
длительный полет мультикоптера. Организация длительного режима наблюдения была
бы возможна при наличии наземной зарядной станции и группы БПЛА. Актуальной
проблемой здесь является заход БПЛА на посадку и его точное позиционирование на
зарядной станции.

Рисунок 1 – Квадрокоптер
В основном системы автоматической посадки квадрокоптера на
зарядную станцию основаны на использовании видеокамер для отслеживания
положения БПЛА относительно зарядной станции. Так, в работе [1] предлагается
система, состоящая из двух инфракрасных видеокамер, расположенных на земле.
Инфракрасные камеры модели IRT301
компании IRay Technology имеют разрешение съемки
320x256 пикселей при скорости съемки 50 кадров в секунду. Система отслеживает положение БПЛА во время
процесса посадки. Для увеличения угла обзора используется панорамный наклонный
модуль (PTU).Инфракрасная камера выбрана в качестве отслеживающего
датчика по двум причинам: во-первых она может использоваться круглосуточно,
практически при любых погодных условиях, во-вторых инфракрасная цель может быть
легко отслежена при помощи функции ИК спектра, что более выгодно в
вычислительном смысле по сравнению с классическими алгоритмами слежения.

Рисунок 2 – Наземная система посадки БПЛА
основанная на двух ИК видеокамерах
В исследовании [2] предлагается в качестве основного датчика
использовать расположенные на борту БПЛА контроллер Wii Remote
совместно с инфракрасной камерой. Система не имеет связи с наземной станцией и
работает под управлением бортового 8-ми битного микроконтроллера. Система
способна оценивать относительное положение БПЛА и посадочной платформы с
частотой приблизительно в 50 Гц. Это позволяет БПЛА выполнять маневр посадки
полностью автономно, непрерывно производя визуальное отслеживание посадочной
платформы. Основная идея данной системы посадки заключается в отслеживании
Т-образного шаблона инфракрасного излучения, закрепленного на месте посадки,
для оценки текущего положения БПЛА. Поскольку ИК камера требует прямой видимости ИК излучения, рабочий
диапазон действия системы ограничен в области от 15 до 250 см перед шаблоном.
Отслеживаемый шаблон состоит из четырех инфракрасных светодиодов Vishay TSAL6200
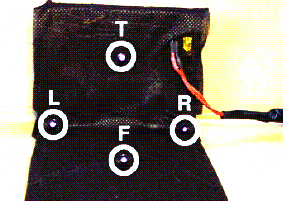
Рисунок 3 – Шаблон с четырьмя ИК светодиодами
Авторами данного исследования предлагается система автоматической
посадки квадрокоптера, основанная на использовании инфракрасного светодиода в
качестве источника оптического излучения, приемниками которого будут четыре
фотодиода, совмещенные с интегральной микросхемой.
Фотоприемники
располагаются на балках рамы квадрокоптера и направлены вниз к земле.
Фотоприемники будут воспринимать излучение источника и выдавать электрический
сигнал, величина которого зависит от смещения центра масс квадрокоптера
относительно источника излучения. Так, если квадрокоптер находится
непосредственно над оптическим маяком, т.е. проекция его центра масс на землю
совпадает с местоположением источника излучения, электрический сигнал на выходе
фотоприемника будет максимальным. Чем больше смещение квадрокоптера
относительно источника, тем меньшую мощность излучения воспримет фотоприемник и
соответственно выдаст меньший сигнал. Зная величины воспринимаемых сигналов на
всех четырех фотодиодах, можно сделать вывод о местоположении квадрокоптера
относительно оптического маяка и выдать соответствующие команды на контроллеры
двигателей. На рис. 4 показан квадрокоптер и расположенные на нем 4
фотоприемника. Красным цветом обозначен оптический маяк, находящийся в центре
посадочной площадки, зеленым цветом показаны диаграммы направленности
фотодиодов, представляющие собой конусы,
вершиной которых является фотодиод, а центром основания является
проекция фотодиода на горизонтальную плоскость.
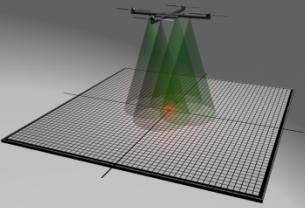
Рисунок 4
Литература:
1. Weiwei Kong, Daibing
Zhang, Xun Wang, Zhiwen Xian and Jianwei Zhang, “Autonomous Landing of an UAV with a Ground-Based Actuated Infrared Stereo
Vision System,” International Conference
on Intelligent Robots and Systems (IROS) November 3-7,2013. Tokyo, Japan.
2. K. E. Wenzel, P. Rosset, and A. Zell, “Low-cost visual tracking of a
landing place and hovering flight control with a microcontroller,” Journal of Intelligent and Robotic Systems,
vol. 57, no. 1-4, pp. 297– 311, Jan 2010.