Батырбеков Д.К.
Казахский национальный аграрный университет г. Алматы,
Казахстан
Синтез гидравлического вариатора, установленного в
кинематической цепи бесступенчатого привода
Проблема передачи в распределения мощности по рабочим механизмам машин является актуальным в машиностроении.
Нашедшие широкое применения известные бесступенчатые передачи (БП) имеют ряд недостатков. К ним можно отнести большие габариты, массу, цену, ограниченный диапазон регулирования.
Причиной этих недостатков является работа управляемых вариаторов в силовой цепи управления. Все известные одно и двухконтурные передачи имеют силовые цепи управления (рис. 1,а). Вариаторы (ВАР) участвуют в передаче мощности, поэтому, габариты, массу, надежность и т.п. всего БП определяют эти вариаторы Р.
Разработан
новый тип бесступенчатой передачи (БП) с кинематической цепью управления (КЦУ),
на изобретений «Управляемая передача Жунисбекова П»
(рис. 1,б) [1]. Отличается данные передачи от известных передач с силовой цепью
управления (рис.1,а) тем, что управляют передаточным отношением кинематической
не участвующим в передачи мощности. Достигается это тем, что в цепи управления
используют самотормозящий червячный механизм (СМ) (рис.1,б) исключающий
циркуляцию потока мощности по контуру. Мощность от управляемого звена
дифференциала не пропускается самотормозящим механизмом СМ в сторону вариатора
– ВАР. При этом вариатор – ВАР работает без передачи мощности и имеет
относительно малые габариты и массу, обладает высокой надежностью и т.д.
Для многих отраслей машиностроения
проблема бесступенчатого регулирования скорости имеет большое значения. Она
может быть решена применением гидравлических, электрических или механических
бесступенчатых вариаторов.
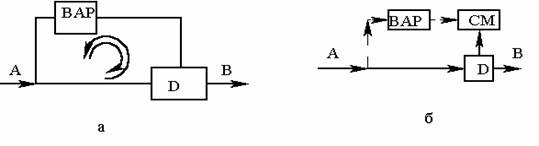
Рисунок 1 – Схемы БП, а – с силовой, б
– без силовой цепями управления, ВАР – вариатор, D – дифференциал и СМ – самотормозящий
механизм.
Недостатком механических
вариаторов является значительное скольжение в месте контакта фрикционных
элементов, что обусловливается геометрией самих элементов и сопровождается
нагревом передачи и износом рабочих поверхностей.
Для устранения этих
недостатков в цепи управления, применяем гидравлический вариатор. Передача
(рис.2) содержит дифференциал D имеющий звено 1, соединенный с ведущим валом А, звено 2 – с
ведомым валом В и управляемым звеном 3. Ведущий вал А через привод 4,
гидронасос 5, гидропривод G, гидромотор 6, червяк 7 и колесо 8
связан с управляемым звеном 3 дифференциала D. Гидропривод оснащен дросселем слива
9, перепускным клапаном 10 и баком Б.
Муфта М и дроссель 9 гидропривода G кинематически
связаны с пультом 11 управления бесступенчатой передачи [2].
При пуске, гидромотор начинает работать с определенным запаздыванием до достижения рабочего давления. Поэтому улучшение качества регулирования – это устранение запаздывание момента пуска гидромотора. Большое запаздывание момента пуска гидромотора – это необходимое время подъема давления во входе в гидромотор. В магистрали высокого давления установлен предохранительный клапан, предназначенный для ограничения давления в подводимом к нему потоке рабочей жидкости. Уменьшение запаздывания момента пуска достигаем установкой дросселя на выходе из гидромотора.
Для постановки задачи
синтеза гидравлического вариатора составляем, уравнения движения применив
уравнения Лагранжа II рода.
Будем рассматривать,
механическую систему с одной степенью свободы приняв, за обобщенные координаты
угол φ поворота вала гидронасоса.
Применяемой типовой схеме
гидравлического вариатора геометрические постоянные машины гидронасоса и гидромотора одинаковы. Так как жидкость несжимаема, тогда
передаваемый расход жидкости гидронасоса будет равен расходу гидромотору. Из этого следует, что они вращаются с
одинаковой скоростью вращения.
Рисунок 2 -
Бесступенчатая передача с гидравлической цепью управления: 1 – солнечная
шестерня; 2 – ведомое звено; 3 – управляемое звено; 4 – кинематически
цепь; 5 – гидронасос; 6 – гидромотор; 7 – червяк; 8 –
червячное колесо; 9 – дроссель слива; 10 – предохранительный клапан; 11 – пульт
управления; М – муфта; Б – сливной бак; G – гидропривод; D –
дифференциал.
В соответствии с
выбранной обобщенной координатой имеем
![]() .
(1)
.
(1)
Уравнение (1) позволяет
составить дифференциальное уравнения движения механической системы.
Составим выражение для
кинетической энергии системы Т так как функцию обобщенной скорости ![]() и обобщенной
координаты φ.
и обобщенной
координаты φ.
Кинетическая энергия
системы равна сумме кинетической энергии Т1 - гидронасоса и
кинетической энергии Т2 – гидромотора.
Кинетическая энергия
гидронасоса, совершающего вращательное движение
![]() .
.
Кинетическая энергия гидромотора
![]()
Найдем значения слагаемых
уравнений Лагранжа
 (2)
(2)
Для определения Qφ на механическую систему, сообщив ей
возможную скорость ![]() , получим выражение возможной мощности Nφ
, получим выражение возможной мощности Nφ
![]()
![]() . (3)
. (3)
Общее решения
дифференциальное уравнения (3) имеет вид
![]() .
(4)
.
(4)
при t=0 
![]() .
.
Минимальная величина
модуля ускорения при торможении, а следовательно и минимальная величина
динамической нагрузки в гидроприводе получаются при законе постоянного
ускорения.
Рекомендуемая
бесступенчатая передачи в перспективе найдет применение в станках, волочильных
станах, нефтяных, горных машинах и агрегатах, тракторах, комбайнах,
автомобилях, сельскохозяйственных машинах и во многих других машинах и
агрегатах.
Рисунок 3 – График
зависимости φ от времени t
Литература:
1. Регулируемая передача Жунисбекова П. / П.Жунисбеков (СССР).- А.с.СССР № 4278439/63; Заяв. 28.05.87; Опубл. 15.01.93. Бюл. №2.
2.
Заявка № ГР 2006/0680.1 «Бесступенчатая передача».