Технічні
науки/Механіка
К.т.н. Гаврилів Ю.Л., к.т.н. Панчук
А.Г.
Івано-Франківський
національний технічний університет нафти і газу
Дослідження параметрів
планетарного редуктора
Розвиток нафто- і газовидобувної промисловості суттєво залежить від темпів
буріння свердловин. Останні значно стримуються аваріями і ускладненнями, на
ліквідацію яких витрачається 10-12% загального часу, що відведений на буріння
свердловин.
Одними з найбільш складних робіт по ліквідації аварій є ловильні роботи.
Вони пов’язані з використанням
дорогого обладнання і інструменту, в тому числі бурильних труб з лівою з’єднювальною різьбою. Так як використання цих труб є економічно
невигідним, було розроблено ряд
конструкцій пристроїв, які б забезпечували проведення ловильних робіт з використанням
звичайних бурильних труб з правими різьбами. Проте проблема створення працездатного
і надійного пристрою для відгвинчування труб у свердловині не вирішена по
сьогоднішній день, тому розробка такої конструкції не втратила актуальності.
При розробці даного
редуктора основними початковими даними є крутний момент на ловильному
інструменті T = 5кН×м
і діаметр обсадної колони, у якій повинен працювати редуктор, D = 190 -
Планетарний редуктор виконується за
схемою, зображеною на рис. 1.
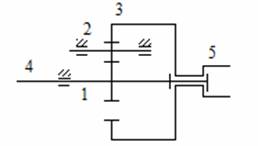
1- ведуче колесо, 2- сателіт на нерухомому водилі, 3- ведене
колесо, 4- ведучий вал, 5- ведений
вал.
Рисунок 1 –
Кінематична схема редуктора
Передавальне відношення такого
редуктора дорівнює відношенню чисел зубів веденого і ведучого коліс, а при
використанні коліс з некоригованими зубами – відношенню ділильних діаметрів
веденого і ведучого коліс.
 . (1)
. (1)
Після
розробки структурної схеми редуктора оптимізація його параметрів проводиться за
умови рівноміцності елементів редуктора. При цьому основними параметрами
оптимізації є модуль передачі і ширина
шестерні –сателіта.
Для оптимізації параметрів розглянемо залежність максимально допустимого крутного моменту на
інструменті від модуля передачі виходячи із міцності ведучого вала і міцності
зубів коліс.
Розглянемо планетарну передачу (рис. 2).
З даної розрахункової схеми визначимо розмір
d3 розр, по якому і будемо проводити розрахунок. Постійним
є зовнішній діаметр корпуса, в якому розміщене внутрішнє колесо з ділильним
діаметром d3. Сателіт має ділильний діаметр d2, а ведуче колесо – d1.
Враховуючи, що максимальне напруження не має
перевищувати допустиме напруження кручення, знаходимо:
 ,
Н×м (2)
,
Н×м (2)
Момент на інструменті рівний:
 , Н×м
(3)
, Н×м
(3)
Це крутний момент, що допускається
редуктором з умови міцності ведучого вала.
Для
розрахунку крутного моменту з умови міцності зубчастого зачеплення слід
провести розрахунки з умов контактної міцності робочих поверхонь зубів і
міцності зуба на згин. З двох отриманих таким чином крутних моментів вибираємо
менший.
Виразимо крутний момент на ведучому валі з розрахунку
на контактну міцність:
 (4)
(4)
Виражаємо
крутний момент з умови міцності на згин  , Н×м (5)
, Н×м (5)
Вибравши менше з двох значень отриманих
моментів проводимо розрахунок крутного моменту на інструменті
 , Н×м
(6)
, Н×м
(6)
Проводимо розрахунки за допомогою ЕОМ (пакет
MATHCAD).
Результатом будуть
отримані графічні залежності моменту на інструменті від модуля передачі.
Розглядаємо залежність
моменту на інструменті від модуля передачі для різних чисел зубів сателітів,
різного числа сателітів і іх ширини.
Розглянемо дану залежність при z =12, змінюючи ширину сателіта b від 100 до
Аналогічно, можна отримати графіки при z =13,14,15,16,17,18.
Наприклад, при z = 17 (рис.
3) момент у 5 кН×м досягається при використанні 5-ти сателітів
шириною
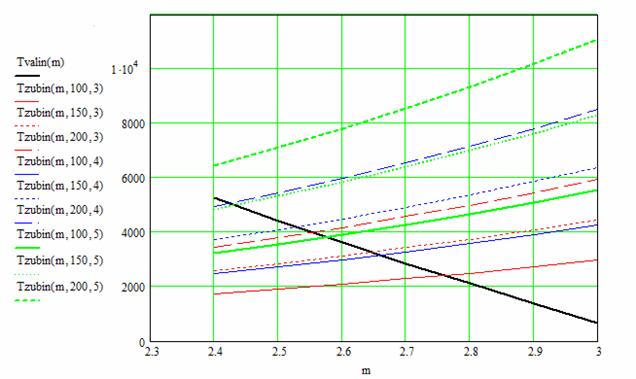 Рисунок
3 – Залежності крутного моменту від параметрів редуктора
Рисунок
3 – Залежності крутного моменту від параметрів редуктора
Хоча при всіх цих числах зубів можна
отримати потрібний крутний момент, при 15 і 16 зубах оптимальний модуль
передачі далекий від стандартного і при заокругленні до стандартних значень
одна з умов міцності не буде витримуватись. При числі зубів рівному z =17 модуль близький до стандартного m =
Отже приймаємо наступні
параметри передачі: m =
nc = 4; b = 200мм.
При числі зубів більшому або рівному 17 зуби
сателітів виконуються некоригованими, що спрощує виготовлення сателітів.
Література:
1. Чернавский С.А. и др. Курсовое
проектирование деталей машин. М.: Машиностроение, 1988.