К.т.н
Владимиров А. В., аспирант Лысянский В. А.
Южно-Российский государственный университет экономики и сервиса, Россия
Автомобильный вариатор на основе
зубчатого планетарного механизма
Актуальной задачей для научных
исследований является повышение эксплуатационных свойств транспортных средств,
которые отвечают за тягово-скоростные и топливо-экономические характеристики.
Решение такой задачи связано с совершенствованием автоматических трансмиссий,
ведущую роль в котором занимает проектирование устройств вариации скорости.
В настоящее время на автомобилях
распространены клиноременные и торовые вариаторы.
На рисунке 1 представлена принципиальная
схема исполнительного механизма клиноременного вариатора. Клиноременной вариатор состоит из нескольких (как правило,
одной- двух) ременных передач, где шкивы образованы коническими дисками, за
счет сдвигания и раздвигания которых изменяются диаметр шкивов и,
соответственно, передаточное число [1]. Ремень представляет собой набор
металлических пластин трапецеидальной формы.
Рисунок 1- Принципиальная
схема клиноременного вариатора
1- ведомый шкив; 2- ведущий
шкив; 3- ремень; 4-пружина.
Исполнительный механизм торового вариатора
(рис. 2) состоит из двух дисков, у которых образующей рабочих поверхностей
является дуга окружности. Ведущий и ведомый диски расположены соосно, средняя
плоскость промежуточных роликов смещена относительно их поворота. Регулирование
передаточного числа осуществляется изменением угла ![]() наклона роликов [2].
наклона роликов [2].
Рисунок 2 – Принципиальная
схема торового вариатора
1 - ведущий диск; 2 - ролик; 3
- ведомый диск.
Проведенные исследования показали, что указанные
вариаторы не имеет диапазона изменения крутящего момента от нуля, что вызывает
необходимость применения устройств псевдосцепления таких как
гидротрансформатор, что значительно усложняет конструкцию. Наиболее
распространенные клиноременные передачи имеют узкий диапазон регулирования и не
высокий передаваемый момент, сложную систему управления приводами шкивов,
высокие потери энергии на трение в контактной паре ремень-шкив и быстрый износ
ремня. Все это вызывает высокую стоимость устройства и низкий ресурс работы.
Аналогичные недостатки имеют торовые вариаторы, в
которых передаваемая мощность незначительна, так как зависит от пятна контакта
и коэффициента между диском и роликом. Единственным способом повысить
передаваемую мощность является повышение усилия прижатия одного фрикционного
элемента к другому, но это вызывает большое давление на опоры, потери энергии в
подшипниках и существенно сокращает срок службы. Кроме того, для плавного
изменения передаточного отношения в таких вариаторах требуется высокоточного
перемещения ролика относительно диска (на доли миллиметров). Осуществляется
такое управление прецизионными гидравлическими механизмами, которые усложняют
конструкцию, делают её массивной и дорогой.
Независимо от того с гибкой ли связью или
с непосредственным контактом все бесступенчатые передачи, применяемые в
автомобилях, являются фрикционными, которым свойственно нерешенная проблема –
все усилие сконцентрировано в пятне фрикционного контакта, это вызывает у
разработчиков необходимость применения специальных конструкционных материалов и
специальных эксплуатационных жидкостей. Показатели топливной экономичности
которые у бесступенчатых трансмиссий должны быть выше чем у ступенчатых не
достигают заявляемых разработчиками значений поскольку весь эффект от
согласования динамики движения автомобиля с экономичными режимами работы двигателя
пропадает на потерях энергии во фрикционных контактах. Таким образом, эти
обстоятельства заставляют искать новые научно-технические решения для
достижения эффективного плавного изменения крутящего момента от двигателя к
ведущим колесам с минимальным расходом топлива.
Перспектива решения данной проблемы
связана с созданием постоянно замкнутого привода, содержащего только цепи
зубчатых пар, обеспечивающего плавное изменение мощности, передаваемой на
колеса без потерь, возникающих при размыкании цепи привода, что также повышает
износостойкость элементов привода. Примером такого устройства является
«вариатор Хамукова» [3], представленный на рисунке 3, содержащий два
дифференциальных механизма, кинематически связанных между собой зубчатыми
передачами, и обгонную муфту на валу одного из центральных колес.
Недостатками данного устройства является
сложность конструкции и отсутствие звена, осуществляющего управление
передаточным отношением, поэтому данное устройство можно лишь условно отнести к
вариаторам.
Рисунок 3 – Кинематическая
схема вариатора Хамукова
А1 и А2 – конические
дифференциалы; 1 – входное звено; 2 – выходное звено; 3 – обгонная муфта; 4, 5,
6,7 – зубчатые колеса редукторов в параллельных передачах
С целью устранения указанных недостатков
нами разработан вариатор момента нефрикционного типа, основанного на зубчатом
планетарном механизме [4, 5],
кинематическая схема которого представлена на рисунке 4. Устройство состоит из
дифференциального механизма, входным звеном которого является водило 1 с
сателлитами и двумя центральными колесами 4 и 5, установленными на выходных
валах 2 и 3 соответственно, один из которых соединен с водилом 6 планетарного
механизма, который выполнен двухрядным, а на водиле 6 установлен с возможностью
вращения блок сателлитов 7, образованный двумя соосными сателлитами с равным
числом зубьев, взаимодействующими с двумя центральными соосными зубчатыми
колесами 8, одно из которых закреплено неподвижно, а ко второму подвижному
колесу жестко прикреплен рычаг управления 9 вариатором.
Работа вариатора осуществляется следующим
образом. Вращение от двигателя подается на входное звено (водило) 1
дифференциала. Полученное водилом движение делится между выходными валами 2 и 3
с центральными колесами 4 и 5 соответственно. При неподвижном выходном вале 2
движение центрального колеса 5 передается на водило планетарного механизма 6,
которое вместе с сателлитным блоком 7 свободно вращается вокруг центральных
колес 8, которые остаются неподвижными, поскольку одно из них закреплено
неподвижно, а передаточное отношение равно бесконечности при равных числах
зубьев колес 8.
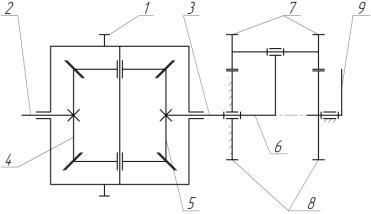
Рисунок 3 - Кинематическая
схема вариатора момента нефрикционного типа
При приложении управляющего момента на
рычаг 9 свободное движение водила 6 с блоком сателлитов 7 затормаживается, и
возникающий момент торможения на валу водила 6 способствует возникновению
крутящего момента на выходном валу 2 вариатора, причем этот момент
пропорционален управляющему усилию. Угловая скорость выходного вала 2 также
начинает увеличиваться по мере преодоления момента полезного сопротивления
пропорционально управляющему воздействию. Диапазон регулирования угловой
скорости выходного вала 2, таким образом, находится в пределах от нуля до
значения, обусловленного передаточным отношением от водила 1 к центральному
колесу 4.
Разработанный макет
данного вариатора (рис. 5) показал его работоспособность.
Достоинствами данного
вариатора являются:
- простота конструкции, за счет
применения только зубчатых колес, которые изготавливаются из инструментальных
сталей;
- способность передачи
крутящего момента свыше 300 Нм, за счет
применения в конструкции вариатора только зубчатых зацеплений, которые способны
по сравнению с фрикционными передачами передавать большие нагрузки при
одинаковых геометрических размерах;
- сниженная в 3-4 раза стоимость, за счет использования деталей
конструкции аналогичных механической коробке передач;
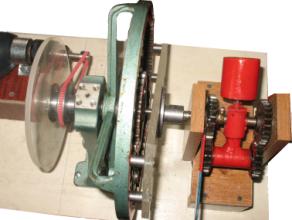
Рисунок 5 – Макет вариатора
момента нефрикционного типа
- более высокий к.п.д.,
за счет отсутствия потерь на трение;
- повышенная
эффективность эксплуатации, за счет применения трансмиссионных масел для
механических КПП и повышенным ресурсом работы зубчатых колес;
- повышенная технологичность конструкции,
обладающая возможностью компоновочного решения, адаптируемого к трансмиссии
серийно выпускаемых автомобилей с механической КПП.
Предложенная схема может быть реализована
из стандартных деталей, аналогично механической коробки передач.
Практический опыт разработки
исполнительного механизма вариатора поставил новые задачи, связанные с
динамическим анализом механизма вариатора, определением его передаточного
отношения, определения диапазона регулирования, определения к.п.д. и
экспериментального исследования его эксплуатационных характеристик.
Литература
1.
Пронин, Б.А.
Бесступенчатые клиноременные и фрикционные передачи (вариаторы) / А.Б. Пронин,
Г.А. Ревков. – из. 3-е, перераб. и доп. – М.: Машиностроение, 1980. – 320 с.,
ил.
2.
Есипенко, Я.И.
Механические вариаторы скорости / Я.И. Есипенко. – Киев: Гос. тех. Издат. УССР,
1961. – 219 с.
3.
Пат. 2146022 Российская
Федерация, МПК 7 F16H3/44. Вариатор Хамукова / Хамуков Ю.Х., Озов Р.М., Вдовин
В.Н. - заявитель и патентообладатель Хамуков Юрий Хабижевич - № 99112210/28;
заявл. 17.06.1999; опубл. 27.02.2000.
4.
Лысянский, В.А. Разработка вариатора
момента нефрикционного типа / В.А. Лысянский, А.В.
Владимиров, С.А. Кузнецов // Студенческая
научная весна – 2009: сб. науч. трудов / под ред Е.А. Яценко . – Новочеркасск:
ЮРГТУ (НПИ), 2009. - С. 128-131.
5.
Заявка 2008130281
Российская Федерация, МПК F16H 3/74, F16H 48/06. Вариатор момента нефрикционного типа /
Кузнецов С.Н., Лысянский В.А., Владимиров А.В.; заявитель ООО «Таурус»; - №
2008130281/11; заявл. 23.07.2008; опубл. 27.01.2010, Бюл. № 3.