УДК 621.878:531.3
Бондаренко Л.
М., Яковлєв С.О., Гуменюк В.Є.
Дніпропетровський національний
університет залізничного
транспорту ім. акад. В.А.Лазаряна(ДІІТ)
ОДИН ІЗ СПОСОБІВ ВДОСКОНАЛЕННЯ ПРОЦЕСУ КЕРУВАННЯ ДИНАМІЧНИМИ ПРОЦЕСАМИ
ВІЗКІВ
МОСТОВИХ КРАНІВ
Розглянута в [
1 ] задача дозволяє вдосконалювати процес керування динамічними процесами в
режимах пуску або гальмування і зменшити перевантаження в гнучких, пружних
(канатах) елементах з врахуванням розгойдування вантажу на канаті.
Є можливість
встановлення процесу керування динамічними процесами у режимах пуску або гальмування і зменшення
перевантажень у гнучких та пружних органах візків мостових кранів за рахунок
зміни матеріалів коліс.
Спочатку, як і в
[ 1 ], проведемо розрахунки без врахування каната.
Радіус
приведення
![]() (
1 )
(
1 )
де ![]() – радіус коліс;
– радіус коліс; ![]() – передаточне число
редуктора.
– передаточне число
редуктора.
Для
знаходження прискорень в процесі пуску механізму необхідно знати момент
статичного опору пересування візка [ 2 ]
![]() ( 2 )
( 2 )
Де ![]() ,
, ![]() – маси
вантажу і візка;
– маси
вантажу і візка; ![]() – коефіцієнт тертя в цапфі;
– коефіцієнт тертя в цапфі; ![]() – діаметр
цапфи;
– діаметр
цапфи; ![]() – коефіцієнт тертя
кочення колеса по рейці;
– коефіцієнт тертя
кочення колеса по рейці; ![]() – ККД механізму пересування.
– ККД механізму пересування.
В
[ 3 ] доведено, що
для підшипників кочення формула ( 2 ) може бути записана у вигляді
![]() (
2а )
(
2а )
Якщо
у формулі ( 1 ) радіус колеса знаходиться із контактної теорії Герца [
4 ], то величина ![]() в формулі ( 2а )
знаходиться тільки експериментально.
в формулі ( 2а )
знаходиться тільки експериментально.
В
[ 3 ] отримане аналітична залежність для визначення
коефіцієнта тертя кочення, яка утримує тільки загальноприйняті механічні
константи і розміри контактуючих тіл.
При
початковому лінійному контакті
![]()
де ![]() – півширина плями контакту;
– півширина плями контакту;
![]() – в метрах.
– в метрах.
Нагадаємо,
що формула ( 3 ) отримана при рівності модулів пружності матеріалів колеса та
рейки і при коефіцієнтах Пуассона рівних 0,3.
Оскільки
контактні напруження повинні бути рівними допустимим, то радіус колеса
![]() ( 4 )
( 4 )
де ![]() –
ширина головки рейки .
–
ширина головки рейки .
Таким
чином, радіус приведення
![]() ( 5 )
( 5 )
Зміни радіусів
приведення від величини допустимих контактних напружень при ![]() =
= ![]() =
= ![]() = 24;
= 24; ![]() = 40мм;
= 40мм; ![]() Мпа показані на рис.1;
тут ж показані зміни моменту статичного опору при
Мпа показані на рис.1;
тут ж показані зміни моменту статичного опору при ![]()
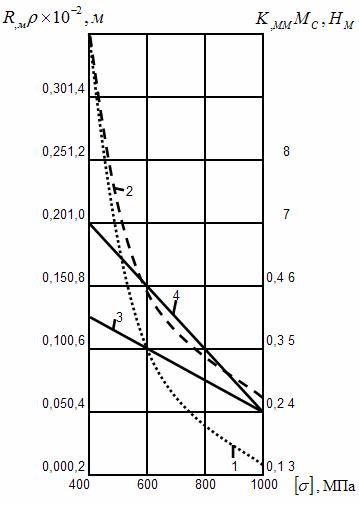
Рис. 1. Залежність від допустимих
контактних напружень: 1 – радіус приведення; 2 – радіус колеса; 3 – коефіцієнт
тертя кочення; 4 – статичного моменту
Оскільки
[ 1 ] допустимий момент двигуна
![]() (
6 )
(
6 )
де ![]() – приведене значення
допустимого прискорення;
– приведене значення
допустимого прискорення; ![]() – задане лінійне прискорення
вантажу;
– задане лінійне прискорення
вантажу; ![]() – сумарний приведений
момент інерції;
– сумарний приведений
момент інерції; ![]() –
момент інерції ротора двигуна і деталі, які обертаються; звичайно, що
–
момент інерції ротора двигуна і деталі, які обертаються; звичайно, що ![]() теж залежить
від допустимих контактних напружень.
теж залежить
від допустимих контактних напружень.
Залежність
![]() від
допустимих контактних напружень при
від
допустимих контактних напружень при ![]() ;
; ![]() показана на
рис. 2
показана на
рис. 2
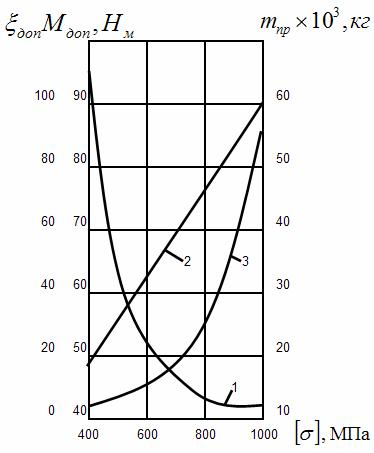
Рис. 2. Залежність від величини
допустимих контактних напружень між колесом візка та рейкою: 1 – сумарного
приведеного моменту інерції; 2 – приведеного значення допустимого прискорення;
3 – маси візка та приведеного до швидкості візка моменту інерції частин, які
обертаються
Приведена маса візка знаходилась із виразу
![]() ( 7 )
( 7 )
Аналіз отриманих формул та графіків дозволяє
зробити такі висновки:
-
величина допустимих контактних напружень
між ободом ходового колеса і рейкою візків мостових кранів суттєво впливає на
величину статичного моменту, зменшуючись зі збільшенням допустимих напружень і
при ![]() Мпа момент менший на
58%, чим при
Мпа момент менший на
58%, чим при ![]() Мпа;
Мпа;
-
допустиме приведене прискорення
збільшується зі збільшенням величини ![]() , сягаючи різниці у п’ять разів при
, сягаючи різниці у п’ять разів при ![]() і
і ![]() Мпа;
Мпа;
-
допустимий момент двигуна зменшується зі
збільшенням величини ![]() , особливо різко при
, особливо різко при ![]() …600 МПа;
…600 МПа;
-
зміною величини ![]() можна в широких межах
регулювати перехідні процеси електроприводу візків мостових кранів.
можна в широких межах
регулювати перехідні процеси електроприводу візків мостових кранів.
Література
1.
Повейкін В.С., Човнюк Ю.В., Дікторук
М.Г. Методи математичного модулювання та аналізу механічних перехідних процесів
електроприводів вантажопідйомних розгойдування вантажу при їх пуску /
гальмуванні //Гірничі, будівель., дорож. та меліорат. мат., №64, 2004. – С. 20
– 32.
2.
Справочник по кранам: В 2m.
Т.2 / Александров М.П.,
Гохберг М.М., Ковин А.А. и др. – Л.: Машиностроение, 1988. -559с.
3.
Бондаренко Л.М., Довбня М.П., Ловейкін
В.С. Дефраційні опори в машинах.-Дніпропетровськ: РВА Дніпро – VAL,
2002.-200с.