Физика /1.Теоретическая физика
К.п.н. Мищик С.А.
Государственный морской университет имени
адмирала Ф.Ф.Ушакова ,
Россия
Системность кинематической прикладной физики
морского флота
Системность кинематической прикладной
физики морского флота выражается в применении действий системного анализа. Базисной
характеристикой кинематических параметров судна являются координаты и скорость
движения.

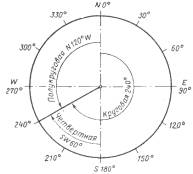
За основное направление в навигации
принимают линию N — S в плоскости
истинного горизонта. При счете направлений применяется круговая система
счета. В ней все направления указываются числом от 0 до 360° по часовой стрелке
от северной части истинного меридиана. Для указания приближенных направлений используют
сохранившуюся со времен парусного флота румбовую систему счета направлений. В
ней весь горизонт разбит на 32 румба по 11,250. Направления N, Е, S,
W являются главными румбами и делят горизонт на четыре четверти: NE —
северо-восточную, SE — юго-восточную, SW — юго-западную и NW — северо-западную.
В мореходной астрономии применяют полукруговую и четвертную системы счета
направлений (азимутов). В полукруговой системе счета направления отсчитываются
от точки N или S в сторону Е или W от 0 до 180°.
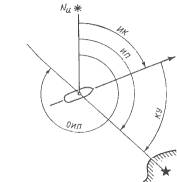
При решении задач навигации анализируется
направление движения судна и направление на ориентиры и суда. Истинный курс
(ИК) — угол в плоскости истинного горизонта между северной частью истинного
меридиана (полуденной линией NS) и диаметральной плоскостью судна по
направлению его движения. Истинный пеленг (ИП) — угол в плоскости истинного
горизонта между северной частью истинного меридиана (полуденной линии NS) и
направлением из точки наблюдения на предмет. ИК, ИП и КУ связаны зависимостью ИП=ИК+КУ.
Направления в море определяют с
помощью магнитных и гироскопических компасов.

Положение судна на поверхности Земли
определяют координатами на земном сфероиде. В этой системе фиксируют двумя координатами:
широтой и долготой. Географическая широта - угол между отвесной линией в данной
точке и плоскостью земного экватора. Географическая долгота - двугранный угол
между плоскостями начального (Гринвичского) меридиана и меридиана данной точки.
Международным Гидрографическим бюро в
1928 г. принята стандартная длина морской мили, равная 1852 м. Длина
стандратной морской мили соответствует длине 1' меридиана земного сфероида в
широте, близкой 45°. Для измерения небольших расстояний применяется кабельтов —
одна десятая морской мили (185,2 м). Кабельтов принимают приближенно равным 185
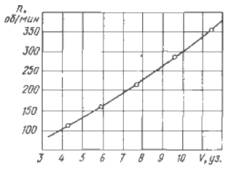
м. Скорость на море измеряют в узлах. Узел — единица скорости равная одной
морской миле в час. 1 узел = 0,514 м/с.
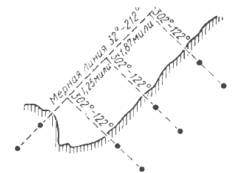
Движение судна относительно дна со
скоростью, называемой абсолютной, рассматривается как
результат сложения вектора скорости судна относительно воды и вектора течения.
Вектор скорости судна относительно воды (относительная скорость) является
результатом работы судовых движителей и действия на судно ветра и волнения. Скорость
определяется и при помощи мерной линии. Измерение продолжительности пробега
производится по показаниям трех секундомеров. Рассчитав среднее время
продолжительности пробега по показаниям секундомеров, определяют скорость.
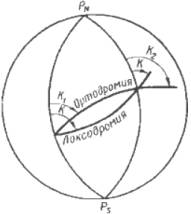

Если совершать плавание постоянным
курсом, то траектория перемещения судна по земной поверхности будет
представлять логарифмическую спираль – локсодромия - «косой бег». Кратчайшее
расстояние между двумя точками на земном шаре измеряется по дуге большого круга
– ортодромия - «прямой бег».
В настоящее время работают системы спутниковой навигации: NAVSTAR (GPS)
и ГЛОНАСС, а также разрабатываются Galileo и Бэйдоу. Это позволило создавать электронные навигационные карты,
на которые наносятся объекты, отображение которых зависит от текущей даты с
круглосуточной техническая поддержкой. Это позволяет создавать системные
автоматизированные навигационные комплексы.
Литература:
Л. Р. Аксютин и др. Справочник
капитана дальнего плавания. М.: Транспорт,
1988. – С.248