Технические науки/Отраслевое
машиностроение
Рубашка В.П.
Украинская
инженерно-педагогическая академия, г. Харьков
Дискретная модель упругой
мостовой системы
с подвижной массой.
Анализ совмещенных режимов работы механизмов
грузоподъемных машин мостового типа показал, что одна из отличительных
особенностей динамического нагружения заключается в нестационарности их упругих
и инерционных свойств. Изменение физических параметров во времени вызывается непосредственно
характером выполняемых перегрузочных операций, связанных с относительным
перемещением дискретных элементов упругой модели, и является неотъемлемой
частью единого колебательного процесса, развивающегося в любом кране мостового
типа. В первую очередь это относится к нестационарным колебаниям, обусловленным
движением тележки в пролете крана мостового типа. При этом происходит не только
дополнительные нагружения металлоконструкции в вертикальной плоскости за счет
перемещения инерционной нагрузки, но и определяемое этим перераспределение
жесткостных и инерционных параметров всей упругой системы.
В
настоящее время нет детальных исследований рассматриваемых динамических явлений.
В работах, посвященных изучению колебаний подъемно-транспортных машин, как
правило, принимается, что движение тележки происходит по абсолютно жесткому
мосту [1,2]. С другой стороны, известные в теории механических колебаний методы
анализа воздействия подвижных инерционных нагрузок на динамику элементов упругих
конструкций [3,4,5] не учитывают свойств применяемых в подъемно-транспортном
машиностроении рабочих механизмов и способов управления ими, так как
ориентированы на модели с заранее известным законом изменения скорости
перемещаемых масс.
В данном же случае, мы имеем механическую
систему, дискретное включение которой движется под воздействием нестационарного
внешнего усилия, развиваемого приводным механизмом. Причем, исследования,
проведенные в работе [6] показали, что этот процесс определяется не только параметрами
электропривода, но и уровнем колебаний несущей конструкции. Таким образом,
перемещение дискретной массы, с одной стороны влияет на динамические свойства
упругой модели с другой стороны,
поставлено в зависимость от них.
Следовательно, возникает необходимость совместного решения
уравнений движения массы и колебаний упругого объекта, являющихся звеньями
единой нестационарной системы. Считается, что подвижная нагрузка в каждый
момент времени разбивает пролет несущего строения на элементы переменной длины.
Для получения решений вводятся нестационарные дискретные модели, которыми
представляются элементы переменной длины. В качестве метода дискретизации
выбран метод конечных элементов, преимущества которого в определении параметров
дискретной схемы наиболее ярко проявляются для систем с зависимыми во времени
свойствами.
В качестве объекта исследований рассмотрим
мостовую конструкцию с постоянными по длине значениями жесткости ![]() ,
погонной массы
,
погонной массы ![]() и произвольными условиями опирания концов.
Система несет массу
и произвольными условиями опирания концов.
Система несет массу ![]() ,
положение которой в пролете характеризуется координатой
,
положение которой в пролете характеризуется координатой ![]() .
Вид модели представлен на рис. 1.
.
Вид модели представлен на рис. 1.
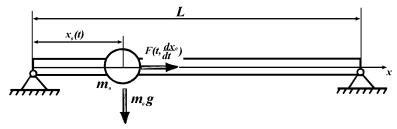
Рис.
1. Модель мостовой конструкции с подвижной массой
Из
характера внешнего силового нагружения видно, что масса ![]() перемещается под воздействием нестационарного
усилия
перемещается под воздействием нестационарного
усилия ![]() ,
величина которого в общем случае может зависеть не только от времени, но и от
скорости движения дискретного включения, а также уровня его колебаний вместе с
несущей упругой конструкцией. В этом состоит основное отличие данной задачи от
классической постановки, где задается не движущая сила, а закон изменения
скорости тела, что не всегда точно отражает реальные условия его передвижения.
,
величина которого в общем случае может зависеть не только от времени, но и от
скорости движения дискретного включения, а также уровня его колебаний вместе с
несущей упругой конструкцией. В этом состоит основное отличие данной задачи от
классической постановки, где задается не движущая сила, а закон изменения
скорости тела, что не всегда точно отражает реальные условия его передвижения.
С целью построения математической модели,
описывающей колебания системы, будем считать, что в каждый момент времени ![]() подвижная масса
подвижная масса ![]() разбивает пролет на два участка с переменной
во времени длинной.
разбивает пролет на два участка с переменной
во времени длинной.
Представим конструкцию конечно-элементной
моделью с постоянным числом узлов дискретизации. Разбиение на конечные элементы
проводится таким образом, чтобы первый и последний узлы совпадали с точками
опор моста, а один из промежуточных узлов – с положением подвижной массы мо в
данный момент времени.
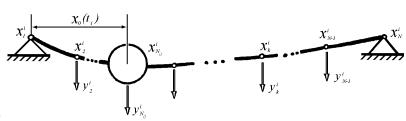
Рис.
2. Конечно - элементная модель моста для момента времени ![]() .
.
В работе [6] приведена система уравнений,
описывающих поведение системы мост – подвижная инерционная нагрузка. Из этой системы уравнений для момента
времени ![]() определяются
упругие перемещения моста
определяются
упругие перемещения моста ![]() и
новое текущее положение подвижной массы
и
новое текущее положение подвижной массы
![]() .
.
Это новое положение подвижной массы является
основой для введения новых узлов дискретизации где первый и последний совпадают
по-прежнему с опорами моста, а некоторый промежуточный – с новым положением
подвижной массы ![]() .
.
Рис. 3. Конечно - элементная модель моста для момента
времени ![]()
Динамика
такой системы описывается системой уравнений аналогично той, которая
соответствовала предыдущему моменту времени ![]() только относительно уже новых неизвестных,
которые характеризуют прогибы моста в новых точках дискретизации и нового
положения подвижной массы.
только относительно уже новых неизвестных,
которые характеризуют прогибы моста в новых точках дискретизации и нового
положения подвижной массы.
Следует
отметить, что такая схема позволяет рассматривать значительно более широкий
класс задач, связанных не только с изучением колебаний несущей конструкции, но
и характером передвижения по ней сосредоточенной инерционной нагрузки.
Литература:
1. Хиценко А.И.
Моделирование колебаний груза при перемещении тележки мостового крана / А.И.
Хиценко, С.Р. Бежин // Машинознавство. Матеріали 13
регіональної науково-методичної конференції. Донецьк: ДонНТУ, 2010.
2. Ловейкин В.С.
Оптимизация переходных режимов движения механизма передвижения тележки
грузоподъемных машин / В.С. Ловейкин, В.Ф. Ярошенко // Вестник Харьковского
национального технического университета сельского хозяйства имени Петра
Василенка. – 2007. – 460 с
3. Глухов Ю.П.Динамика многослойной предварительно
напряженной плиты на жестком основании при воздействии подвижной нагрузки
[Текст] / Ю. П. Глухов // Доповіді Національної академії наук України. - 2012. - N 2. - С. 70-75.
4. Архипенко Юрий Васильевич. Методика расчета динамического
взаимодействия подвижных нагрузок с мостами с применением программных
комплексов конечно-элементного анализа : дис. канд. техн. наук : 05.23.11
Москва, 2006 176 с. РГБ ОД, 61:07-5/469
5. Облакова
Т.В. О резонансном режиме в нестационарной задаче о подвижной нагрузке для
упругого полупространства. Инженерный журнал: наука и инновации. №9, 2013.
6. Рубашка В.П.
Математическая модель мостовой конструкции с подвижным инерционным
включением.// Материалы ІІІ Международной научно-практической конференции
«Эффективные инструменты современных наук – 2007». Технические науки.
–Днепропетровск: Наука и образование, 2007.