К.т.н. Неженцев А.Б.
Национальный
технический университет Украины (КПИ), Киев, Украина
Схема УСТРОЙСТВа
ДЛЯ ДИНАМИЧЕСКОГО ТОРМОЖЕНИЯ КРАНОВых механизмов
Разработано устройство для динамического торможения (УДТ) асинхронных приводов передвижения и поворота грузоподъемных кранов [1, 2], функциональная схема которого приведена на рис. 1, а возможный вариант принципиальной электрической схемы – на рис. 2.
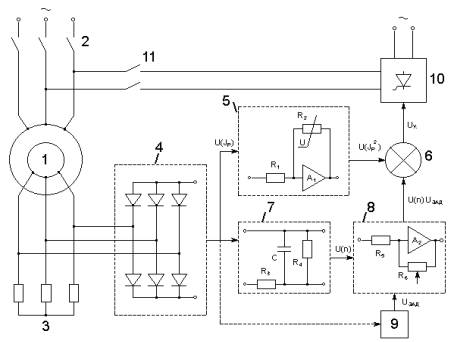
Рис. 1. Функциональная схема устройства УДТ
УДТ содержит:
асинхронный электродвигатель 1 с фазным ротором, обмотка статора которого через
контакты 2 подключена к сети переменного тока, резисторы 3 и трехфазный
выпрямитель 4, подключенные к обмотке ротора. Выход выпрямителя 4 через умножитель
напряжения (квадратор) 5 присоединен к одному из входов блока управления 6. К
выходу выпрямителя 4, также подключен датчик частоты вращения 7, сигнал с
которого поступает на один из входов блока перемножения напряжений 8, другой
вход которого присоединен к задатчику 9. Выход блока 8 подключен ко второму
входу блока управления 6, выход которого соединен с входом управляемого выпрямителя
10. Последний через контакты 11 подключен к обмотке статора двигателя 1.
В предложенном УДТ осуществляется
автоматическое регулирование тока возбуждения в функции поддержания равенства:
U(I2р)
= U(n)·Uзад.
Поддержание этого равенства позволяет
получать постоянный момент двигателя в режиме динамического торможения при заданной
нагрузке на валу двигателя (т.е. заданном весе груза на крюке). В зависимости
от величины нагрузки на валу двигателя автоматически изменяется величина
постоянного момента торможения двигателя. При этом снижаются динамические
нагрузки элементов привода и металлоконструкции крана, уменьшается раскачивание
груза, что позволяет осуществлять остановку крана с высокой точностью.
Принципиальная
электрическая схема УДТ (см. рис. 2) состоит из трех частей: силовой,
управления УДТ и управления тиристорным выпрямителем.
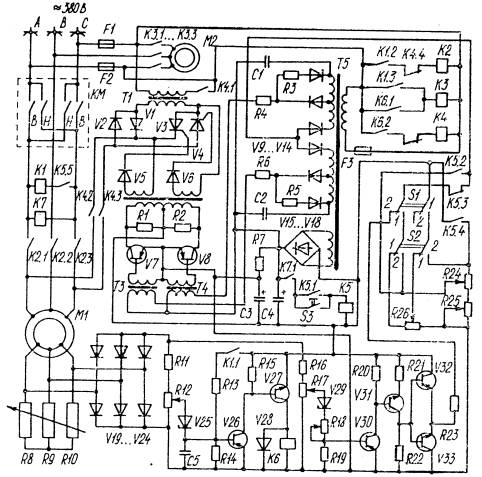
Рис. 2. Принципиальная электрическая схема привода с УДТ
Силовая часть схемы содержит:
трансформатор Т1; блок коммутации, состоящий из контакторов рабочего режима К2,
внешнего возбуждения К4, подключения колодочного тормоза К3; реле переключения
двигательного и тормозного режимов К1; управляемый выпрямитель, выполненный на
диодах V1, V2 и тиристорах V3, V4.
Схему управления УДТ составляют трехфазный
выпрямитель V-19…V-24 два блока сравнения (R11, R12, V25 и R16, R17,
V29), два усилителя постоянного тока, выполненные соответственно на транзисторах V26, V27 и V30…V33, и реле контроля тока ротора К6.
Схема управления тиристорным выпрямителем
состоит из двух фазосдвигающих мостов, образованных вторичными обмоткам
трансформатора Т5, диодами V9...V14, конденсаторами С1, С2 и резисторами R3…R6, двух импульсных
трансформаторов Т3 и Т4, двух усилителей импульсов (собранных на транзисторах V7 и V8,
разделительного трансформатора Т2, диодов V5, V6 и резистора R26 (или R24).
Разработанное устройство позволяет
реализовать следующие режимы динамического торможения: автоматический без
обратных связей; автоматический с отрицательной обратной связью от цепи ротора
двигателя; управляемый посредством педали. Испытания УДТ, проведенные на
разработанном стенде и мостовом кране г/п 5 т, подтвердили его высокие
эксплуатационные качества: плавность торможения, надежность, удобство управления.
При этом уменьшилось раскачивание груза, что дало возможность осуществлять погрузочно-разгрузочные
операции на повышенных скоростях и тем существенно увеличить производительность
крана и улучшить условия работы машиниста.
Литература
1. Патент України №53022А, МКІ B66C13/22, B66C13/30, H02P3/24. Пристрій для керування гальмуванням електроприводів
кранових механізмів / Нєженцев О.Б., Будіков Л.Я., Аветісян
С.М.. - Опубл. 15.01.03. Бюл. № 1.
2. Неженцев А.Б. Совершенствование
устройства для динамического торможения механизмов кранов // Materials of the
XI International scientific and practical conference, «Prospects of world
science», - 2015. Volume 10. Technical sciences. Sheffield. Science and
education LTD. - Str. 31-33.