ӘОЖ 004.8
Arduino платформасында робот жасаудың
мүмкіндіктері
Жетимекова Г.Ж.
Қолданбалы
математика және информатика кафедрасының аға оқытушысы
Әзімхан Д.
Ақпараттық
жүйелер мамандығының 3 курс студенті
Қазіргі
таңдағы робот жасау үшін арнайы алгоритмдер қызмет
етеді. Алгоритмнің бірінші пункті – объектіні табу. Ол үшін
сенсорлы жүйемен танысып алу қажет.
Қазіргі
заманда заманауи технологиялар тек ғылыми салада ғана қызмет
атқармайды, күнделікті адам өмірінде де маңызы зор,
себебі ол кез келген істі жеңіл етеді. Мұндай
өзгерістердің бір мысалы әртүрлі саладағы
жұмыс орнын автоматтандыру. Бұл нанотехнология
қашықтықтан басқару мүмкіншілігін бере алады.
Мұндағы
ең негізгі құрылғы датчик болып табылады. Бұл құрылғылар
сыныптарына: дальномер мен камераны жатқызуға болады. Роботтың
жұмысының тиімділігі мен қолданысы тұрғысынан
алғанда итальяндық өндірушілердің Arduino
микроконтроллерін жатқызуға болады.
Дальномер
–объектіге дейін ара қашықтықты өлшейтін
құрылғы.
1 суретте құрылғының
жұмыс істеу принципі келтірілген.
Яғни,
дальномер арқылы кедергіге дейін ара қашықтықты
анықтайтын болсақ, камера арқылы ол кедергіні айналып
өту жүзеге асырылады. Сондықтан ең тиімді
құрылғы ретінде камера таңдап алынды.
Келесі кезеңде
датчиктін орналасуын қарастырайық. Датчиктердің қызметі
үшін екі нұсқаның ерекшелігін қарастыруға
болады:
1) Камера
жоғарыдан орналасқан және роботқа
бағытталған;
2) Камера
робот үстінде орналасқан және қарама-қарсы
кедергіге бағытталған.
Сонымен,
робот автоматтандырылған құрылғылар арқылы
қоршаған ортамен байланыс циклы (Сурет 1).

Сурет 1. Роботтың функционалды сызбасы
Arduino платформасында
робот жасаудың ерекшеліктерін қарастыра отырып жұмыстың
мақтасын ашуға болады. Роботтың негізгі мақсаты
кедергіні айналып өту.
Негізгі 3
жағдайын қарастырайық:
1) Сол
жақтағы кедергі;
2) Оң
жақтағы кедергі;
3) Орта
тұстағы кедергі;
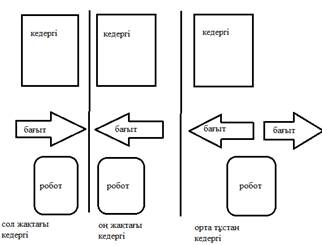
Сурет 2. Кедергіні айналып өту жоспары
Жоғарыдағы
суретте бағыттауыштар көмегімен кедергілерді айналып өту
жағдайлары көрсетілген (Сурет 2).
Бұл
сызбаларға қарап жоспарды бірнеше кезеңдерге бөлуге
болады:
1) Объектіні
іздеу;
2)
Кедергініңроботқақатыстыарақашықтығы;
3)
Кедергігеқатыстыроботтыбасқару;
4) Басқаруға
байланысты робот жылдамдығы;
Бастапқы
уақытта робот белгілі бір жылдамдыққа ие болады, тіптен
кедергіні бірден анықтау мүмкін емес. Тағы бір жағдайда
кедергі роботқа тым жақын орналасып, оның айналып өту
қабілеттілігін азайтады. Сондықтан оның қозғалу
бағыты осыған тікелей байланысты (Сурет 3).
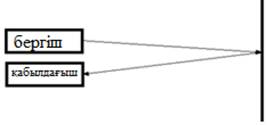
Сурет
3.Дальномерменсигналдардықабылдау мен беру
Оперативті
есте сақтау құрылғысынан бөлек МК
құрамында программалар мен мәліметтерді сақтауға
арналған энергиядан тәуелді жадылар болуы мүмкін.
Бағасы жағынан арзан бұл жадылар тек бір ретті жазба
жазуға мүмкіндік береді. Мұндай құрылғылар
контроллер программасы қайтадан жаңартуды қажет етпеген
жағдайда қодданылады. Контроллерлердің басқа
модификациялары энергиядан тәуелді жадыға бірнеше рет программа
жазуға мүмкіндік береді [1].
Микроконтроллерлерде
болуы мүмкін перифериялардың тізімі:
1)
Әмбебап
цифрлық порттар;
2)
Енгізу-шығарудың
әртүрлі интерфейсті;
3)
Аналогті-цифрлық
және цифрлы-аналогті түрлендіргіш;
4)
Компараторлар;
5)
Таймерлер;
6)
Енгізілген тактілік
генератор;
7)
Кеңжолақты-импульсті
модуляторлар;
8)
Радиожиіктілікті қабылдағыштар
мен таратқыштар;
Микроконтроллерлерде қолданылатын жадының 3 негізгі түрін
ажыратуға болады:
1)
Бағдарламалар
жадысы;
2)
Мәліметтер
жадысы;
3)
МК регистрлері
Программалар жадысы программалық код пен
константаларды сақтауға арналған тұрақты жады.
Жадының бұл түрі бағдарлама жазу барысында
құрамын өзгертпейді.
Мәліметтер жадысы программаларды орындау барысында
айнымалыларды сақтауға арналған.
МК регистрі – жадының
бұл түрі периферийлі құрылғыларды
басқаруға арналған.
Arduino
тақшалары үшін әр түрдегі бірнеше кеңейту
тақшалары шығарылған. Arduino - ның кеңейту
тақшалары, LilyPad тақшалары мен кішкентай модульдерінен
басқа, базалық Arduino
тақшаларымен толық үйлесім тапқан. Платформаларға орнатылған
кеңейту тақшалары Arduino – ның басқа
құрылғыларды басқаруда және мәліметтерді
алуда функционалдылығын кеңейтеді.
ProtoShield кеңейту жиынтығы дәнекерлеуді пайдаланбай,
қолдан істеуге арналған. Барлық тәжірибелерді байланыс
(контакт) ұяшықтарымен кішкентай ғана панельде жүзеге
асыруға болады. ProtoShield қазіргі таңда шилдтар ішіндегі
ең қарапайым түрі. Олардың қолданылуы үшін
Arduino – да PLD разъемдар орнатылады (Сурет 4).
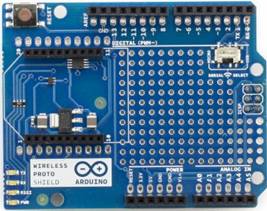
Сурет 4. Arduino ProtoShield жиынтығы
Ardumоto
тақшасы кішкентай электроқозғалтқыштарды
басқаруда өте қолайлы.
Электроқозғалтқыштардың сымдары тақша
үлгісінің винттік қысқыштарына оңай
жалғанады, аз көлемдегі бағдарлама көмегімен
қозғалтқыштардың айналу бағытын және
қажетті жылдамдылық мөлшерін беруге болады [2].
Arduino
микроконтроллерін пайдаланып робот жасаудың ерекшеліктері жоғарыда
көрсетлген жиынтыққа негізделіп қызмет атқарады.
Arduino
Ethernet – бұл ATmega328 базасындағы микроконтроллер тақшасы.
Ол Arduino тақшасын локальді желіге және Интернет желісіне
қоса алады. Сонымен қатар Wiznet W5100 желілік контроллеріне
негізделіп, TCP және UDP
хаттамаларын сүйемелдейді. Қорыта айтқанда ғылым мен білім,
қымбат құрылғыларсыз еш нәтиже шықпайтынын
айтықымыз келеді. Осындай жағдай көптеген
қызығушыларды осы микроконтроллерлерді өз проектісіне
қосуға мүмкіндік береді. Алайда қазіргі таңда
шығып жатқан қолдану үшін аса терең
білімнің немесе көп қаражатты талап етпейтін
микроконтроллерлерді пайдалану өте тиімді дәрежеге жетті.
Әдебиеттер:
1.
И.И. Мачульский (ред.) Робототехнические системы и комплексы. М.: Транспорт,
1999. – 446 с.
2.
С.Л. Зенкевич, А.С. Ющенко Основы управления манипуляционными роботами: учебник
для вузов. – 2-е изд., исправ. И доп. М.: Изд-во МГТУ им. Н.Э.Баумана, 2004. –
480 с.