Технические
науки. Транспорт
К.т.н. Славич В.П.
Херсонский национальный технический университет, Украина
Моделирование процесса обгона
транспортных средств
Рассмотрим
некоторую условную однополосную (в каждом из направлений) проезжую часть, по
которой движутся транспортные средства. Пусть за одним некоторым транспортным
средством следует другое, движущееся с большей скоростью. Обозначим их соответственно
через ТС1 и ТС2. Построим
модель процесса, связав между собой параметры, с получением результирующего времени,
за которое ТС2 обгонит ТС1.
Определим
входные параметры модели.
1)
V1 и V2 – скорости движения соответственно первого и второго транспортных
средств, м/с (для
упрощения построения модели будем считать, что скорость движения каждого транспортного
средства постоянна, также будем полагать, что V1<V2.);
2)
ld1 и ld2 – динамические габариты соответственно первого и второго
транспортных средств, м;
3) l0 – начальное расстояние между транспортными средствами, м;
4) lб – безопасная дистанция между автомобилями должна составлять,
м;
5) x – ширина каждой из полос движения дороги, м.
Разобьем
процесс моделирования на следующие этапы:
1) приближение
ТС2 к ТС1 на величину lб;
2) перемещение ТС2 на встречную полосу;
3)
непосредственно обгон первого транспортного средства вторым;
4) возвращение
ТС2 на исходную полосу движения после достижения расстояния в
величину lб между ТС1 и ТС2.
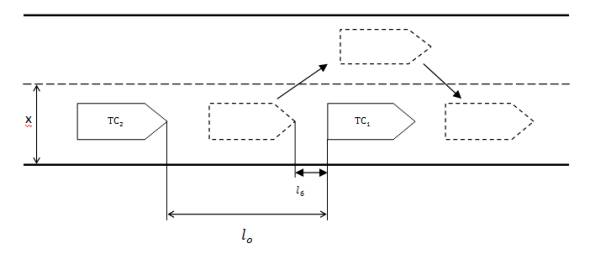
Рис.1. Схема обгона транспорного средства
Для
каждого из данных этапов определим время, за которое данный этап происходит, введя
вспомогательные переменные t1, t2, t3, t4 – время, за которое
происходит соответствующий индексу номер этапа.
Тогда
продолжительность первого шага будет определяться выражением:
 , с.
, с.
Далее,
не теряя общности рассуждений, предположим, что перемещение из одной полосы в
другую происходит под углом ![]() Тогда
продолжительность второго этапа будет находиться из выражения:
Тогда
продолжительность второго этапа будет находиться из выражения:
 , с.
, с.
Для
определения величины t3 найдем расстояние, на
которое переместиться ТС1 за
время t2:
![]() , м.
, м.
Определим
расстояние ![]() между передними
бамперами обоих транспортных средств:
между передними
бамперами обоих транспортных средств:
![]() , м.
, м.
Тогда продолжительность третьего этапа
определяется системой выражений:
Также
очевидно, что будет справедливым равенство:
![]() .
.
Тогда
суммируя все значения продолжительности каждого из этапов, получим полное время обгона:
![]() , с.
, с.
Окончательно,
исключив все вспомогательные параметры, выражение примет вид:
Таким
образом, построенная обобщенная модель процесса обгона на однополосной проезжей
части позволяет определять время обгона наблюдаемого транспортного средства
другим, движущимся с большей скоростью. Данные изложения рекомендуется
использовать при разработке автоматизированных систем управления дорожным
движением, а также при изложении курсов дисциплин, включающих в себя моделирование
транспортных потоков, студентам транспортных специальностей.
Литература:
1.
Капитанов В.Т. Управление транспортными потоками в городах. М.: Транспорт /
Капитанов В. Т., Хилажев Е.Б. 1985. - 94 с.
2.
Клинковштейн Г.И. Организация дорожного движения / Клинковштейн Г.И. [Учебник
для автомобильно-дорожных вузов и факультетов] – М., «Транспорт», 2001. - 192
с.
3.
Лобанов Е.М. Транспортная планировка города. – М.: Транспорт, 1990. - 240 с.
4.
Смирнов Н.Н. Математическое моделирование автотранспортных потоков / Смирнов
Н.Н., Киселев А.Б., Никитин В.Ф., Юмашев М.В. // мех-мат МГУ, 1999. - 191
с.
5.
Собакар А.О. Основи безпеки дорожнього руху: Навч. посіб./ Собакар А.О.,
Холмянський Я Д., Тараненко С.М. За ред. В.М. Бесчастного – Л.: Знання, 2007. - 312
с.
6.
Хомяк Я.В. Организация дорожного движения / Хомяк Я.В. – К.: Вища школа, 1986. - 271
с.