Смағұлова Қ.Қ., Жакин А.М., Жұманбаев Н.Н., Ғаббасова Г.Н., Жекеева Ш.Е.
Қарағанды мемлекеттік техникалық
университеті,
Қазақстан Республикасы
Мехатроника және роботтытехниканың қазіргі
замандағы күйі
Мехатроника
және роботтытехника – ғылым және техниканың жаңа
саласы, механика, электроника және микропроцессорлық техника,
информатика білім салаларына негізделген машиналар мен қозғалысты
компьютерлік басқару жүйелерін құру және
қолдануға, сонымен қатар заманауи, жаңа сапалы, тіптен
әмбебап қасиеттері бар электрмеханикалық
жүйелердің құрылысын зерттеуге арналған.
Әдетте, мехатрондық жүйе – бұл микроконтроллер, дербес
компьютер немесе есептеуіш құрылғылар арқылы
басқарылатын жаңа күшті электроника арқылы
біріктірілген электрмеханикалық компоненттер. Соған қарамастан, бұл жүйе – мехатрондық
тұрғыдан стандартты компонентерді қолданғанымен,
мүмкіндігінше біртекті құрылады, конструкторлар
жүйенің барлық құрамдас бөліктерін
біріктіруде модулдер арасында артық интерфейстерді
қолданбауға тырысады. Әдетте, микроконтроллерға
енгізілген аналогты цифрлық түрлендіргіш, интеллектуалды
күшті түрлендіргіштер және т.б. Бұл жүйенің
массасы мен өлшемдерін қысқартады, жүйенің
сенімділігін артады және қандайда бір артықшылықты
көбейтеді.
Жапон деректері
бойынша заманауи «Мехатроника» терминін 1969 жылы Yaskawa Electric фирмасы енгізген. Бұл
атау «МЕХАника» және «элекТРОНИКА» терминдерінің бірігуінен пайда
болды.
Роботтытехниканың
дамуы кезеңі XX ғасырдың 40-жылдары болып табылады, осы
жылдары Окридж және Аргонн ұлттық зертханаларында
көшірме түріндегі манипуляторлар жасалды, бұл манипуляторлар
радиоактивті заттармен жұмыс істеуге арналған. Елу жылдардың
аяғында «Юнимейшн» фирмасы компьютер арқылы басқарылатын ең алғашқы
өндірістік роботты жасады. Келесі он бес жыл бойы көптеген өндірістік
және тәжірибелік құрылғылар жасалды.
Роботтытехниканың
тарихы адам ойлап тапқан ғылыми жаңалықтармен
байланысты.
Б.з.д. V – II ғасырлар – сулы және
құмды сағаттар, күрделі автоматтар.
Б.з.д. V ғасыр - Платонның
еңбектерінде адамның ойлауы және механикаға
қатысты идеялар кездеседі.
Б.з.д. IV ғасыр - Аристотель өзінің «Органон» атты
логикалық еңбегінде логиканың формальді бөлімі –
силлогистика туралы бөлімді ғылымға енгізеді. Оның
еңбектері дүние жүзілік логикалық ғылымның
дамуына әсер етеді. XVII ғасырға дейін Еуропада логика
ғылымы Аристотельдік көзқараспен дамиды.
Б.з.д. III ғасыр – Александр
қаласының грек
ғалымы және физигі Ктесибиус су сағатын
құрастырады. Бұл ең алғашқы дәл
хронометрлік өлшемдерді жасайтын автомат болып табылады. Сағат қозғалатын денелерден
тұрады. Бұған дейін тек құм сағаты
жасалған еді. Ктесибиустін есімі ең алғаш тістік беріліспен
байланысты.
Б.з.д. II ғасыр - Қытайда күрделі автоматтар, сонымен
қоса тұтас механикалық оркестрлар жасалды.
XV – XVII
ғасырлар – механикалық адам, әйел - андроид, ұшатын
ағаштан жасалған қоңыз, ағаш автомат, қосу
және азайту машинасы, қосу машинасы. Француз механигінің 1738 жылы жасаған үйрегі (1-ші
сурет).
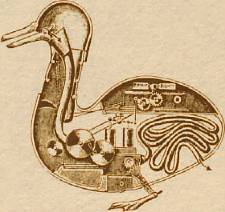
1 – сурет – Вокансон үйрегі
XVII – XIX
ғасырлар – автоматты тігін машинасы, аналитикалық машина,
электрреле, электрмоторлары, ең алғашқы электржетектері, Булы
адам, автоматты адам.
XX – XXI
ғасырлар – электронды лампа, ең алғашқы конвейер,
шамдық триггер, кинематографтағы алғашқы робот,
электрлік ит, электрмеханикалық тасбақа, Versatran роботы, осьминог
тәрізді манипулятор, ең алғашқы мобильдік робот,
ең алғашқы векторлық суперкомпьютер, электржетектері
бар манипулятор, үй шаруашылығындағы робот,
телебасқарылатын манипулятор, алғашқы өндірістік
бағдарламаландырылатын робот, жартылай өткізгіш ЭЕМ,
өндірістік робот – манипулятор, Rancho Arm жасанды роботтондырылған
қолы, автономды көлік роботы, алғашқы жүретін
робот, робот – гуманоид, робот – ит, 8 биттік микроконтроллер, робот –
трансформер, ұшатын робот, дүние жүзіндегі ең
алғашқы кішкентай робот, үш дөңгелекті үй
роботы, ең алғашқы киборг, космостық манипулятор,
киберлік ит.
Негізінен
көптеген заманауи жүйелер мехатронды болып табылады не
қандайда бір мехатронды идеяға негізделеді. Сондықтан
біртіндеп мехатроника «барлық туралы ғылымға» айналып келеді.
Роботтар түрлі-түрлі өлшемдерде және формаларда болады, олар кез келген тәртіпте
жұмыс істей алады. Мысалы, термостат, сканер – бұлар робот болып
табылады. Мұндай роботтарға әдетте, «автомат» деген термин
қолданады, себебі олар адаммен ешқандай ұқсастығы
жоқ. Қазіргі роботтар жасанды интеллект технологиясы
көмегімен алдын-ала құрылған немесе оператор
бұйрығы арқылы қандай да бір әрекеттер орындайды.
Роботтар адам баласына тікелей көмектесе алады: ауыр жүктерді
көтеру, зиянды материалдармен жұмыс жасау, тағы басқа
да пайдалы әрекеттер. 2-суретте мехатроника мен роботтытехниканың
құрамдас бөліктері көрсетілген.
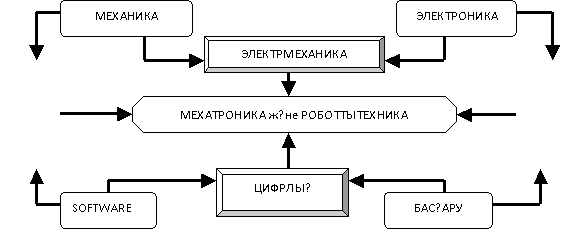

2 –
сурет – Мехатроника мен роботтытехниканың құрамдас
бөліктері
Қазіргі
таңда мехатроника мен роботтытехника ТМД елдерінің мынадай
салаларында қолданылады: роботтытехника (өндірістік және
арнайы); авиациалы, космостық және әскери техника;
көлік құрылысы
(мысалы, тежегіш жүйесін алдын ала тоқтатпау, автокөлік
және автотұрақ қозғалысының
тұрақтандыру жүйесі); әдетті емес транспорттық
жүйелер (электрвелосипедтері, жүкті арбалар, электрроллерлер,
мүгедектерге арналған арбалар); офистық техника (мысалы,
көшірме және факсты құрылғылар; есептеуіш
техниканың элементтері (мысалы, принтерлер, плоттерлер, дискжетектері);
медициналық құрылғылар (клиникалық, қызмет,
емдеу); күнделікті техника (кір жуу, тігін, ыдыс жуу және
басқа да машиналар); бақылау-өлшеу құрылғылары
мен машиналары.
Жалпы роботтар
қолдану саласына қарай үш топқа бөлінеді:
а) адам тәрізді;
ә) ақпараттық (зерттеуіш),
өте қауіпті не адам қолы жетпейтін ортада ақпарат жинау
үшін арналған;
б) өндірістік
роботтар, өндірістің әртүрлі салаларының
технологиялық процесстерін автоматтандыру үшін арналған.
Көптеген
өндірістік роботтар шағын
электронды есептеуіш машиналар арқылы басқарылады, негізінен
роботтар қарапайым механизм болып табылады. Өндірістік
роботтардың көптеген жіктемелік өлшемдері бар:
1. Операцияларды
орындау қасиетіне байланысты: технологиялық (өндірістік); көмекші
(көтергіш – көліктік); әмбебап;
2. Мамандық
дәрежесіне қарай: әмбебап (көпмақсатты);
мамандандырылған; арнайы (мақсатты);
3. Басқару тәсіліне қарай:
«қатты» бағдарламасы бар (1 - ұрпақты); 2 –
ұрпақты; интегральды (3 - ұрпақ);
4. Қолдану саласына қарай (
өндіріс түріне қарай): механикалық өңдеу;
ұсталық өндіріс; құйма өндірісі;
дәнекерлеу; көліктік т.б.;
5. Жүк
көтеруге байланысты (ең басты қасиет): өте жеңіл
– 1 келіге дейін; жеңіл – 1 келіден 10 келіге дейін; орташа – 10 келіден
200 келіге дейін; ауыр – 200 келіден 1000 келіге дейін; өте ауыр – 1000
келіден жоғары;
6.
Қозғалу дәрежесінің санына қарай: бір
дәрежелі қозғалыс; екі дәрежелі қозғалыс;
7. Орын ауыстыру қабілетіне қарай:
станционарлы; жылжымалы;
8. Конструкторлық орындалуына
қарай: еденді; ілмелі; енгізілген;
9. Негізгі
координаттық қозғалыс түріне қарай
өндірістік роботтар топтарға бөлінеді және бұл
роботтардың манипуляторлары мынадай координаттық жүйеде
жұмыс істей алады: тік төртбұрышты координаттық
жүйе; цилиндрлік координаттық жүйе; сфералық
координаттық жүйе; бұрыштық координаттық
жүйе; біріктірілген координаттық жүйе;
10. Күш
жетегінің түріне қарай: біріктірілген координаттық
жүйе, пневматикалық; гидравликалық; электрмеханикалық;
біріктірілген;
11. Орын ауыстыру мен жылдамдықты
бағдарламалауына байланысты: қатты бағдарламалау; жеңіл
бағдарламалау;
12. Бағдарламалау тәсіліне
қарай: үйрету арқылы бағдарламалау (көп
кездесетін тәсіл); аналитикалық бағдарламалау;
өзін-өзі үйрету.
Өндірістік
роботтар жіктемелік өлшемдермен бірге олардың техникалық
дәрежесін негіздейтін өлшемдермен де сипатталады.
Техникалық
сипаттама мынадай көрсеткіштерден тұрады:
1)
жүк көтергіштік, келі;
2)
жетек түрі;
3)
қозғалыс дәрежесінің саны;
4)
жұмыс ортасының геометриялық
сипаттамасы;
5)
басқару жүйесінің түрі;
6)
ең үлкен абсолюттік қателік;
7)
сенімділік.
Төменгі кестеде өндірістік роботтардың
қолдану салалары көрсетілген.
1 - кесте - Өндірістік роботтардың
қолдану салалары
|
Қолдану
салалары |
Атқару
қызметтері |
|
Көмір және кеналу
өндірісі |
Қоспадан көмірді алу. |
|
Металлургия |
Металл өнімдерін пешке енгізу; Пеш, доменді жөндеу; Алюминий электролизі кезінде
анодтық әсерді жою; Әкелу және жеткізу. |
|
Құрылыс өндірісі |
Кірпіштерді орналастыру; Кірпіштерді конвейерде
сұрыптау. |
|
Көлік |
Әкелу және жеткізу
жұмыстары; Темір жолдарының регламентті
қызмет көрсетуі; Қадам басатын көліктік
машиналар. |
|
Шаруашылық өндіріс |
Көкөністер мен жемістерді
жинау. |
|
Медицина |
Хирургия (микрохирургия, стерильді
хирургия); Диагностика; Мүгедектер мен
науқастарды емдеу; Мүгедектер мен
науқастарды күту. |
Тәжірибенің
артуына орай роботтытехника екі мақсатқа тіреледі - ары қарай
роботтарды өндіруді арттыру және оларды қолдануды
жеңілдету. Бұл мақсаттардың орындалуы роботтардың
интеллектуалды және сезімталдық дәрежесін артуымен
тығыз байланысты. Роботтытехниканы келешекте қоғамның
барлық талаптарын толыққанды қанағаттандратын
интеллектуалды және сезімтал роботтардың гармоникалық
үйлесімділігі деп қарастыруға болады.
Қолданылған әдебиеттер тізімі:
1. Накано Э. Введение в робототехнику: Пер. с
япон. М.: Мир,1988.-334 с., ил.
2. Хомченко В.Г., Соломин В.Ю. Мехатронные и
робототехнические системы. Учеб.пособие.-Омск:Изд-во ОмГТУ, 2008.-160 с.
3. Юревич К. Основы робототехники.-Спб. БХВ - Петербург,
2005.- 416 с.