Динамика механизма свободного хода релейного типа
Механизмы
свободного хода являются устройствами для передачи вращательного движения лишь
в одном направлении. Эти механизмы широко используются в машиностроении,
например, в гидротрансформаторах (установка
реакторного узла), импульсных бесступенчатых передачах, инерционных
автоматических трансформаторах вращающего момента, электростартерных системах
запуска двигателей, приводе различных металло- и деревообрабатывающих станков
и других подобных механизмах, где
передача вращающего момента осуществляется только в одном направлении.
Существует множество различных конструкций
механизмов свободного хода [1], например, роликового типа (рис. 1).
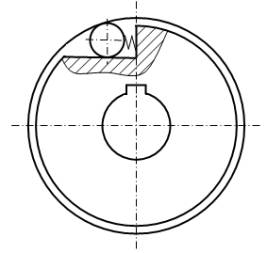
Рис.
1. Конструкция роликового механизма свободного хода
Существуют
и другие типы механизмов свободного хода: эксцентриковые, храповые, пружинные и
т.д. Но, несмотря на такое разнообразие конструкций и большие усилия по
созданию надежных механизмов свободного хода, эти механизмы по-прежнему
остаются самыми слабыми звеньями во многих приводных системах. Именно недостаточная
долговечность механизмов свободного хода сдерживает, например, широкое
применение инерционных автоматических бесступенчатых механических передач,
обладающих целым рядом преимуществ по сравнению с передачами других типов. Поэтому создание надежного механизма свободного хода
является актуальной проблемой машиностроения.
Автор
разработал конструкции механизмов свободного хода [2, 3], работающих по
релейному принципу, а именно: через заклинивающие элементы свободного хода
передается только часть нагрузки. Основная часть крутящего момента (нагрузки)
передается, минуя заклинивающие элементы. Такое конструктивное решение
позволяет разгрузить механизмы свободного хода в десятки и сотни раз. Принцип
действия разработанного механизма
свободного хода аналогичен работе электрического реле, когда через слабую
электрическую схему передается лишь ток малой мощности, но это приводит к
срабатыванию основной электрической цепи, способной надежно передавать главный
поток электрической энергии. На рис. 2 изображена одна из предложенных схем
механизмов свободного хода релейного типа.
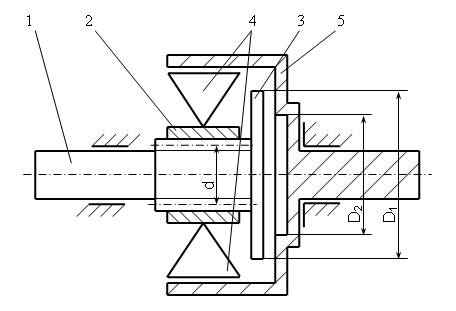
Рис.
2. Схема механизма свободного хода релейного типа
На ведущем валу
1, установленном с помощью передачи «винт – гайка» во внутренней обойме 2
механизма свободного хода, закреплен фрикционный диск 3. Заклинивающие элементы
4 взаимодействуют с наружной обоймой 5 механизма свободного хода, связанной с ведомым валом. ![]() обозначают наружный и
внутренний диаметры фрикционной поверхности контакта звеньев 3, 5, а через
обозначают наружный и
внутренний диаметры фрикционной поверхности контакта звеньев 3, 5, а через ![]() обозначен средний
диаметр винтовой нарезки.
обозначен средний
диаметр винтовой нарезки.
Учитывая
переменность структуры, математическую модель такого механизма можно
рассматривать как совокупность систем дифференциальных уравнений, записанных по
участкам [4].
На участке
совместного вращения ведущего вала и внутренней обоймы со скоростью меньшей
угловой скорости наружной обоймы система дифференциальных уравнений движения
имеет вид:
где ![]() ─
соответственно углы поворота ведущего вала, внутренней и наружной обойм
механизма свободного хода;
─
соответственно углы поворота ведущего вала, внутренней и наружной обойм
механизма свободного хода;
![]() ─ соответственно моменты инерции ведущего вала,
внутренней и наружной обойм с приведенными к ним моментам инерции заклинивающих
элементов;
─ соответственно моменты инерции ведущего вала,
внутренней и наружной обойм с приведенными к ним моментам инерции заклинивающих
элементов;
![]() ─ момент
сопротивления, действующий на наружную обойму.
─ момент
сопротивления, действующий на наружную обойму.
При равенстве
угловых скоростей ведущего вала и наружной обоймы происходит переход на второй
участок, при котором ведущий вал совершает осевое перемещение до упора с
торцевой поверхностью наружной обоймы. Уравнения движения при этом примут вид:
где ![]() ─ масса ведущего вала;
─ масса ведущего вала;
![]() ─ ход резьбы;
─ ход резьбы;
![]() ─ возвращающая осевая сила, действующая на ведущий вал.
─ возвращающая осевая сила, действующая на ведущий вал.
При упоре
торцевых поверхностей ведущего вала и наружной обоймы происходит переход
системы на следующий участок, при котором все звенья механизма свободного хода
вращаются как единое целое. Уравнения движения на этом участке запишутся так:
Решение
полученных по участкам систем дифференциальных уравнений не вызывает каких-либо
проблем. Проблема появляется при построении периодических решений и заключается
в необходимости отслеживания моментов перехода с участка на участок, так как
рассматриваемые механизмы свободного хода являются техническими системами
переменной структуры. Решение проблемы заключается в сведении полученных систем
дифференциальных уравнений к одной системе. Действительно, величину осевого
зазора между торцевыми поверхностями ведущего вала и наружной обоймы можно
свести к минимуму. При этом, применяя функцию Хевисайда ![]() , уравнения движения механизма свободного хода можно записать
в виде одной системы дифференциальных уравнений:
, уравнения движения механизма свободного хода можно записать
в виде одной системы дифференциальных уравнений:
 (1)
(1)
Запись уравнений
движения в виде системы (1) позволяет избежать необходимости отслеживать
моменты изменения законов движения механизма при переходе с участка на участок.
Достаточно задать лишь начальные условия, что значительно упрощает исследование
динамики механизма свободного хода и построение периодических решений.
Для числового
сравнительного анализа существующих и предложенных методов аппроксимации одну из
функций Хевисайда известной ее аналитической аппроксимацией ![]() , где
, где ![]() - наперед заданное достаточно большое число, и аппроксимацией
по предложенной процедуре
- наперед заданное достаточно большое число, и аппроксимацией
по предложенной процедуре ![]() . Замена лишь одной из функций Хевисайда объясняется лишь
стремлением к упрощению выкладок. Замена всех функций Хевисайда
аппроксимирующими зависимостями дает те же самые результаты.
. Замена лишь одной из функций Хевисайда объясняется лишь
стремлением к упрощению выкладок. Замена всех функций Хевисайда
аппроксимирующими зависимостями дает те же самые результаты.
На рис. 3 изображены
графики зависимостей угловых скоростей ведущего вала и наружной обоймы от
времени, полученные как решения по методу Рунге-Кутта системы (1) с помощью
компьютерной программы MathCAD. В Приложении 5 дается
пример компьютерной программы, соответствующий этому случаю. Крутящий момент
определялся зависимостью ![]() , где
, где ![]() ─ постоянные
коэффициенты,
─ постоянные
коэффициенты, ![]() - циклическая
частота. Параметры системы были приняты следующими:
- циклическая
частота. Параметры системы были приняты следующими:

Начальные
условия имели вид:
![]() .
.
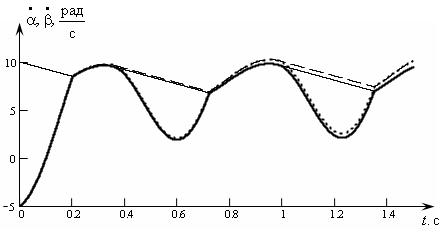
Рис.
3. Зависимости угловых скоростей
при
различных приближениях функции Хевисайда
Сплошными линиями изображены графики угловых скоростей при аппроксимации
функции Хевисайда известной зависимостью, пунктирными ─ при аппроксимации
предложенными методами. Как видим, разница малосущественна, но в отличие от
аппроксимации известной зависимостью, предложенные аппроксимации подходят и для
периодических функций.
Литература
1. Леонов А.И. Микрохраповые механизмы свободного
хода. М.: Машиностроение, 1982. 220 с.
2. Алюков С.В. А.с. 1527423, СССР, МКИ F16D 13/02, 11/04.
Выключаемая муфта.
3. Алюков С.В. Патент РФ № 57440. Механизм свободного
хода релейного типа.
4. Алюков С.В. Механизмы свободного хода релейного типа
// Тяжелое машиностроение, Москва, 2010, №12, С. 34─37.