Докт. техн. наук. Вульфсон И. И., канд. техн. наук Грибкова Т. С.,
Ренгевич В. В.
Санкт-Петербургский
государственный университет технологии и дизайна
Оптимизация динамических характеристик циклового механизма при заданной
максимальной скорости
исполнительного органа
При
проектировании входных звеньев механизмов машин-автоматов встречаются случаи, когда синтез закона движения
приводимого рабочего органа должен
производиться при фиксированном максимальном значении первой передаточной функции механизма ![]() , где
, где ![]() – координаты
выходного и входного звеньев кулачкового механизма.
– координаты
выходного и входного звеньев кулачкового механизма.
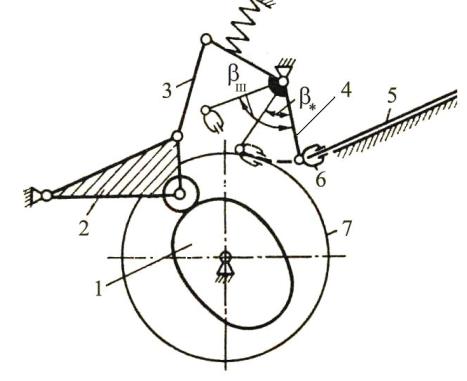
Рис.1. Кинематическая схема форграйфера
Такие исходные условия наблюдаются обычно либо в передаточных или подающих механизмах, в которых кинематические требования предопределяют связь между максимальной скоростью рабочего органа и угловой скоростью входного звена, либо в тех случаях, когда цикловые механизмы используются для сообщения на некотором участке постоянной скорости движения. Подобная ситуация, в частности, возникает при синтезе закона движения листоразгоняющего устройства печатных машин, в механизме раскладки нити текстильных машин, в механизмах подачи инструмента станков-автоматов и др.
В качестве примера более
подробно рассмотрим листоразгоняющее устройство (форграйфер) листовой печатной
машины, типовая схема которого приведена на рис.1. Рычаг
4, являющийся ведомым звеном кулачково-рычажного механизма (звенья 1– 4),
своими клапанами 6 схватывает лист в состоянии покоя, разгоняет его до
постоянной окружной скорости печатного цилиндра 7 и передаёт его в клапаны цилиндра. При этом фиксируется значение ![]() , где
, где ![]() – радиусы рычага 4 и
цилиндра 7. В функции положения
– радиусы рычага 4 и
цилиндра 7. В функции положения ![]() появляется участок
постоянной скорости
появляется участок
постоянной скорости ![]() (рис.2). Координата
(рис.2). Координата ![]() соответствует моменту
передачи листа.
соответствует моменту
передачи листа.
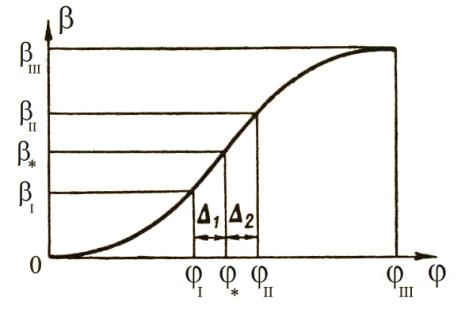
Рис. 2. График функции положения
Несмотря на многообразие модификаций исходных условий, сопровождающих указанное
требование, рациональный синтез кинематических
функций рабочего органа в этом случае приобретает специфический характер,
что нашло отражение в работах [1, 2, 3].
Воспользуемся семейством законов движения с симметричной
формой эпюр ускорений на разбеге и выбеге. Тогда, при заданных значениях ![]() параметры функции
параметры функции ![]() определяются следующими зависимостями:
определяются следующими зависимостями:
![]()
![]() (1)
(1)
Параметр ![]() при выбранной
величине радиуса цилиндра изменяется прямо пропорционально значению радиуса
форграйфера. Таким образом, этот параметр является не только кинематической,
но и конструктивной характеристикой форграйфера. Влияние величины радиуса
форграйфера на момент инерционных сил носит сложный характер и определяется не
только кинематическими факторами, но и конструкцией форграйфера.
при выбранной
величине радиуса цилиндра изменяется прямо пропорционально значению радиуса
форграйфера. Таким образом, этот параметр является не только кинематической,
но и конструктивной характеристикой форграйфера. Влияние величины радиуса
форграйфера на момент инерционных сил носит сложный характер и определяется не
только кинематическими факторами, но и конструкцией форграйфера.
Остановимся на
учете ряда факторов, зависящих от параметра ![]() . Момент
инерционных сил, приведенный к валу форграйфера, в общем случае может быть
представлен в следующем виде:
. Момент
инерционных сил, приведенный к валу форграйфера, в общем случае может быть
представлен в следующем виде:
 (2)
(2)
где ![]() – момент инерции, приведенный к валу форграйфера,
– момент инерции, приведенный к валу форграйфера, ![]() – угловая скорость форграйфера,
– угловая скорость форграйфера, ![]() – угловое ускорение
форграйфера,
– угловое ускорение
форграйфера, ![]() – угол поворота
форграйфера.
– угол поворота
форграйфера.
Форграйфер
представляет собой массивную рамную конструкцию, образованную длинными валами и
связывающими их рычагами. Как показывает анализ, малой переменной частью
приведённого момента инерции, связанную с приводным механизмом, можно пренебречь. При этом ![]() . Тогда уравнение (2) примет вид
. Тогда уравнение (2) примет вид ![]() Очевидно, что
первый сомножитель при уменьшении радиуса форграйфера, а следовательно, и параметра
Очевидно, что
первый сомножитель при уменьшении радиуса форграйфера, а следовательно, и параметра
![]() , уменьшается, а второй – возрастает, стремясь к
бесконечно большому значению по мере приближения радиуса форграйфера к нулю.
Это свидетельствует о наличии оптимального значения параметра
, уменьшается, а второй – возрастает, стремясь к
бесконечно большому значению по мере приближения радиуса форграйфера к нулю.
Это свидетельствует о наличии оптимального значения параметра ![]() , при котором максимальное значение момента инерционных
сил было бы минимальным.
, при котором максимальное значение момента инерционных
сил было бы минимальным.
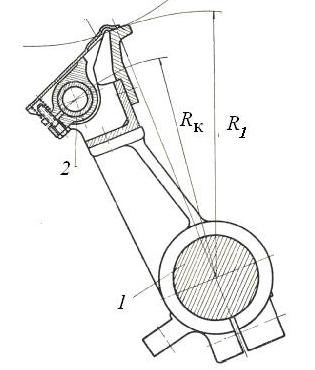
Рис.3. Рычаг форграйфера: 1–вал; 2 – клапанная система
Представим
момент инерционных сил, приведенных к валу форграйфера, как функцию параметра ![]() . Момент инерции J можно рассматривать
как сумму трех существенных слагаемых (рис. 3):
. Момент инерции J можно рассматривать
как сумму трех существенных слагаемых (рис. 3):
![]() (3)
(3)
где ![]() – приведенный момент
инерции коромысла рычажного механизма и вала форграйфера относительно
собственной оси,
– приведенный момент
инерции коромысла рычажного механизма и вала форграйфера относительно
собственной оси, ![]() – моменты инерции
системы, связанной с валом клапанов и рычагов форграйфера относительно оси качания.
– моменты инерции
системы, связанной с валом клапанов и рычагов форграйфера относительно оси качания.
В дальнейших выкладках примем ![]()
![]() (см. рис. 3). Как показывают расчёты, при
увеличении радиуса форграйфера в 2 раза
это отношение изменяется лишь на 4%, поэтому
сделанное допущение является правомерным. Тогда,
(см. рис. 3). Как показывают расчёты, при
увеличении радиуса форграйфера в 2 раза
это отношение изменяется лишь на 4%, поэтому
сделанное допущение является правомерным. Тогда, ![]() где
где ![]() – масса системы,
связанной с валом клапанов форграйфера,
– масса системы,
связанной с валом клапанов форграйфера, ![]() – постоянный
коэффициент. Момент инерции рычагов форграйфера
– постоянный
коэффициент. Момент инерции рычагов форграйфера ![]() с достаточной
точностью определится следующей зависимостью:
с достаточной
точностью определится следующей зависимостью: ![]() , где а2
– постоянный коэффициент,
, где а2
– постоянный коэффициент, ![]() – масса
рычагов форграйфера. Расчет показывает, что масса рычагов форграйфера возрастает
несколько менее интенсивно, чем квадрат радиуса форграйфера. Таким образом,
– масса
рычагов форграйфера. Расчет показывает, что масса рычагов форграйфера возрастает
несколько менее интенсивно, чем квадрат радиуса форграйфера. Таким образом, ![]() , где
, где ![]() – постоянный
коэффициент,
– постоянный
коэффициент, ![]()
В формуле (3) выделим
величины, не зависящие от параметра ![]() :
:
![]() (4)
(4)
здесь ![]() представляют собой своеобразные критерии
подобия инерционных характеристик однотипных форграйферов, не зависящие от
значений
представляют собой своеобразные критерии
подобия инерционных характеристик однотипных форграйферов, не зависящие от
значений![]() Эти величины легко выявить для проектируемого
форграйфера расчетным путем или исходя из известных инерционных характеристик
форграйферов сходной структуры.
Эти величины легко выявить для проектируемого
форграйфера расчетным путем или исходя из известных инерционных характеристик
форграйферов сходной структуры.
Максимальное угловое ускорение определяется как ![]() . Из зависимостей (1)
следует, что при заданных исходных условиях
. Из зависимостей (1)
следует, что при заданных исходных условиях
![]() (5)
(5)
Здесь ![]() – безразмерный коэффициент, зависящий от выбранного закона
движения. В частности, при изменении ускорений по закону равнобокой модифицированной
трапеции
– безразмерный коэффициент, зависящий от выбранного закона
движения. В частности, при изменении ускорений по закону равнобокой модифицированной
трапеции ![]() [1, 2].
[1, 2].
Из
зависимости (5) следует, что при малых значениях ![]() вторая геометрическая
передаточная функция
вторая геометрическая
передаточная функция ![]() обратно
пропорциональна
обратно
пропорциональна ![]() [1, 3]. Далее, на основании (2), (4), (5) получаем
[1, 3]. Далее, на основании (2), (4), (5) получаем
![]() . (6)
. (6)
Минимальному значению максимума момента инерционных
сил отвечает
![]() .
.
Отсюда
 . (7)
. (7)
При учете (7) и пределов изменения показателя степени ![]() можем записать:
можем записать:
Приведенный анализ может предшествовать проектированию и служить
для оценки оптимальности параметров и
совершенствования динамических характеристик механизмов данного класса.
Литература:
1. Вульфсон
И. И. Динамические расчеты цикловых механизмов. Л.: Машиностроение, 1976.– 328
с.
2. Механика машин:
учеб. пособие для втузов./ И.И. Вульфсон, М.З. Коловский, Э.Е. Пейсах и др.;
под ред. Г.А. Смирнова.– М.: Высш. шк., 1996. 511с.
3. Вульфсон И. И. Оптимизационный синтез
функций перемещения исполнительных органов машин при сложных комплексах
дополнительных условий. – Вестник научно технического развития. №4, 2007. – С.
5–24.