Доповідь/Технічні
науки – Автоматизовані системи управління на виробництві
УДК 681.518.68:622.24
Гутак О.В.,
Поддубний М.С., Семенцов
Г.Н.
Івано-Франківський
національний технічний університет нафти і газу
ОЦІНКИ СТАТИСТИЧНИХ ХАРАКТЕРИСТИК
ФЛУКТУАЦІЙ ОСЬОВОЇ СИЛИ НА БУРОВЕ ДОЛОТО В ПРОЦЕСІ ПОГЛИБЛЕННЯ НАФТОВИХ І
ГАЗОВИХ СВЕРДЛОВИН
Технологічний процес
буріння нафтових і газових свердловин є випадковим нелінійним невідтворюваним
параметрично невизначеним об’єктом керування, що функціонує за умов апріорі невідомих
зовнішніх збурень. Тому параметри режимів буріння (осьова сила на долото F і
швидкість обертання долота n) і їх взаємозв’язки з показниками процесу
визначаються ймовірнісними і статистичними характеристиками, а саме – оцінками
математичного сподівання, дисперсії, спектральної густини, автокореляційної та
взаємнокореляційної функцій [1]. Проте до сьогодні не вирішене питання контролю
осьової сили на долото безпосередньо на вибої свердловини і тому цей параметр,
який визначає режим буріння, обчислюється за формулою [1,2]:
![]() , (1)
, (1)
де G – вага колони бурильних труб, яка
вільно висить на гаку бурової установки; G1 – вага колони бурильних труб на гаку під час буріння;
Gγ – втрата ваги від зміни
густини промивальної рідини; GT – сили тертя бурильних труб об
стінки свердловини.
Розробка засобів
вимірювання осьової сили на долото під час буріння нафтових і газових
свердловин є актуальною науково-технічною задачею у зв’язку з інтенсивним
впровадженням в даний час автоматизованих систем керування режимами буріння
[4,5].
Проте, аналіз
літературних джерел [1-6 та ін.] показує недостатній об’єм проведених
досліджень в контексті розробки ефективних вимірювальних каналів для контролю
осьової сили на долото, яка є основним параметром керування процесом буріння.
Особливо важливим цей параметр є під час оптимального керування коли треба
вибрати ефективне зусилля на породу вибою з урахуванням типу бурового долота,
глибини свердловини, фізико-механічних і абразивних властивостей породи та
інших факторів, що впливають на показники буріння.
Тому метою даної
роботи є аналіз статистичних характеристик флуктуацій осьової сили на долото,
за результатами, що отримані під час експлуатації давача, розробленого на
кафедрі автоматизації технологічних процесів і моніторингу екології
Івано-Франківсього національного технічного університету нафти і газу [6]. Принципову
схему давача осьової сили на долото наведено на рис 1.

Рисунок 1 - Принципова схема давача осьової сили на
долото:
ДВР-2б – ресорний давач ваги, ДН – давач натягу канату,
Ω – кут повороту валу сельсину-давача, СД – сельсин-давач, ЛЗ – лінія
зв’язку, СП – сельсин-приймач, РД – двигун з редуктором типу РД-09, П – підсилювач,
ПР – перемикач
Для вимірювання
осьової сили на долото використовується ресорний давач ваги колони бурильних
труб типу ДВР-2б, первинний вимірювальний перетворювач ДН, який перетворює натяг канату у кут
повороту сельсину-давача СД типу БД-404А. Разом з сельсином-приймачем СП і
двигуном РД вони створюють стежну систему, яка передає сигнал, пропорційний
переміщенню Ω, на вихід Uвих, до якого приєднується реєструючий прилад. Довжина лінії
зв’язку ЛЗ дорівнює ≈ 100м. Обчислення осьової сили на долото
здійснюється згідно формули (1). Для дослідження статистичних характеристик
флуктуацій осьової сили на долото використані результати вимірювань, що були
отримані [7] при бурінні свердловини № 1-Синьоводне долотом III У 295,3 СЗГ на
глибині 4666,5-4681,7 м з застосуванням установки “Уралмаш-4Е”. Умови буріння:
середня осьова сила на долото F=50 kH, частота обертання ротора Q=![]() , густина бурового розчину
, густина бурового розчину ![]() , порода – аргіліти бистрицької світи. Розрахунок
статистичних характеристик вихідних даних у вигляді 205 одиниць випадкового
сигналу проведений за допомогою програмних продуктів MathCad, Curve Expert Pro
v.1.63, Matlab. Графік зміни осьової сили в часі, отриманий в результаті
обробки експериментальних даних в програмі MathCad, наведено на рис 2.
, порода – аргіліти бистрицької світи. Розрахунок
статистичних характеристик вихідних даних у вигляді 205 одиниць випадкового
сигналу проведений за допомогою програмних продуктів MathCad, Curve Expert Pro
v.1.63, Matlab. Графік зміни осьової сили в часі, отриманий в результаті
обробки експериментальних даних в програмі MathCad, наведено на рис 2.
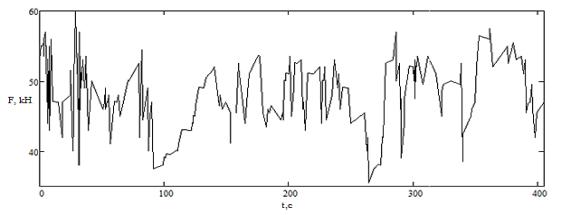
Рисунок 2 – Графік зміни осьової сили у часі, отриманий в
результаті обробки експериментальних даних в програмі MathCad
За допомогою
середовища MathCad отримали наступні оцінки випадкового процесу F(t) (в
розрахунках позначення сили F замінимо на K).
–
Математичне сподівання : m:=mean(K),
mean(K)=47.929,
–
Дисперсія: зміщена оцінка –
var(K)=24.581,
не зміщена оцінка – Var(K)=24.702,
–
Середнє квадратичне відхилення:
зміщена оцінка – stdev(K)=4.958,
незміщена оцінка – Stdev(K)=4.97.
Ці характеристики
для кожного конкретного моменту є середніми з множини. Вони визначаються
одномірним законом розподілу. Для визначення закону розподілу і його перевірки
за допомогою критерію Пірсона ![]() поділимо
вибірку n=205 значень осьової сили на долото F на інтервали та визначимо їх
абсолютні та відносні частоти. Впорядковуємо досліджувану вибірку у порядку
зростання. Для цього застосуємо наступну функцію пакету MathCad:
поділимо
вибірку n=205 значень осьової сили на долото F на інтервали та визначимо їх
абсолютні та відносні частоти. Впорядковуємо досліджувану вибірку у порядку
зростання. Для цього застосуємо наступну функцію пакету MathCad:
![]()
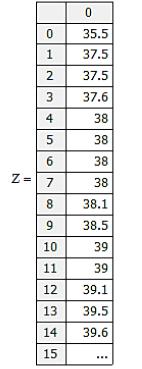
Отримуємо таблицю
значень:
Знаходимо зону розсіювання значень за
формулою:
R=max(x)-min(x),
R=24.5.
Розділюємо її на 7
груп із інтервалами h=3.5. Далі
визначаємо границі інтервалів та зберігаємо їх як масив int:
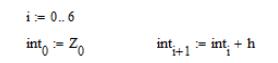 ,
,
де Z0 – найменше значення
величини х; int0 – нижня
границя першого інтервалу; inti+1 – верхня границя і-го інтервалу.
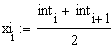
Середини інтервалів
розрахуємо за формулою:
Для обчислення
абсолютних частот інтервалів (масив ni) використаємо вбудовану функцію MathCad:
mi:=hist(int,Z)
Відносні частоти
обчислюємо за формулою:
![]()
В
результаті розрахунків отримаємо наступні значення:
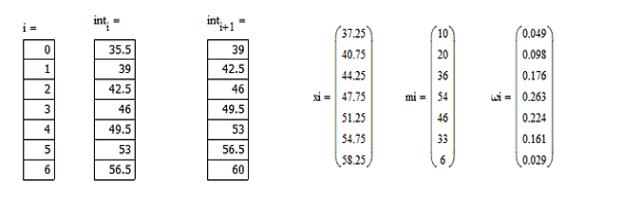
Таблиця 1 - Сортування масиву експериментальних значень
осьової сили на долото F
|
Кількість інтервалів |
Межі інтервалів |
Кількість повторень |
Середнє значення |
Імовірність |
|
|
від |
до |
||||
|
0 |
35.5 |
39 |
10 |
37.25 |
0.049 |
|
1 |
39 |
42.5 |
20 |
40.75 |
0.098 |
|
2 |
42.5 |
46 |
36 |
44.25 |
0.176 |
|
3 |
46 |
49.5 |
54 |
47.75 |
0.263 |
|
4 |
49.5 |
53 |
46 |
51.25 |
0.224 |
|
5 |
53 |
56.5 |
33 |
54.75 |
0.161 |
|
6 |
56.5 |
60 |
6 |
58.25 |
0.029 |
Виконаємо перевірку обчислення абсолютних та відносних
частот:
За отриманими даними побудуємо гістограму густини
відносних частот, яка зображена на рис 3.
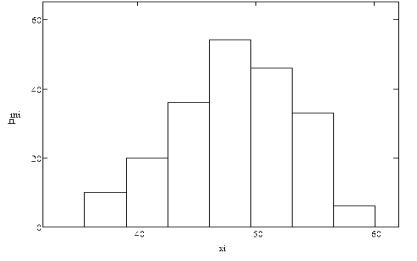
Рисунок 3 – Гістограма густини відносних частот для осьової
сили на долото F
По отриманій
гістограмі можна припустити, що даний розподіл підпорядковується нормальному
закону. Побудуємо графік функції розподілу:
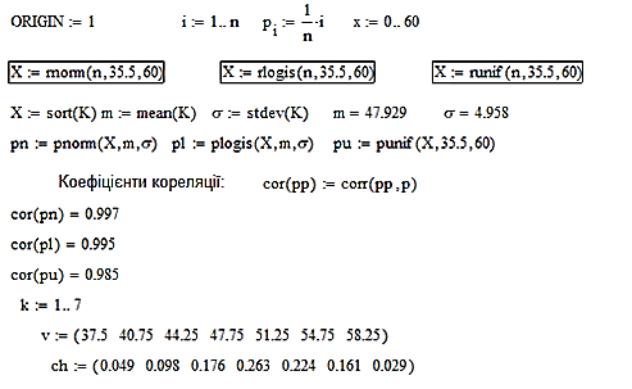
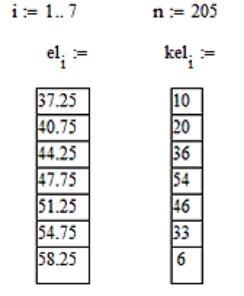
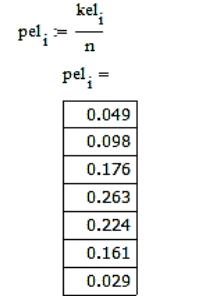

Рисунок 4 – Закон розподілу для осьової сили на долото F
За отриманим на рис.
4 графіку можна припустити, що даний розподіл підпорядковується нормальному
закону розподілу. Для підтвердження даної гіпотези скористаємось критерієм
Пірсона![]() :
:
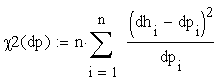
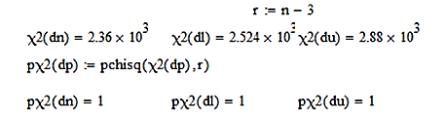
Отже, даний розподіл
(рис. 4) підпорядковується закону Гауса.
Для випадкової
функції F(t) отримані на основі
нього характеристики, такі як оцінка математичного сподівання та дисперсія, ще
не є достатніми для оцінки характеру протікання випадкового процесу в часі. Тому
необхідно ще встановити зв’язок між значеннями випадкового процесу F(t) в різні
моменти часу. Це зробимо за допомогою двохмірної функції розподілу [3] –
автокореляційної функції або функції спектральної густини. Для визначення
автокореляційної функції скористаємось пакетом Matlab. Імпортуємо дані і отримаємо
графічне зображення нормованої автокореляційної функції осьовоїсили на долото Rxx(τ) на рис 5.
>> Rxx =xcorr(F,T,205) >> plot(Rxx)
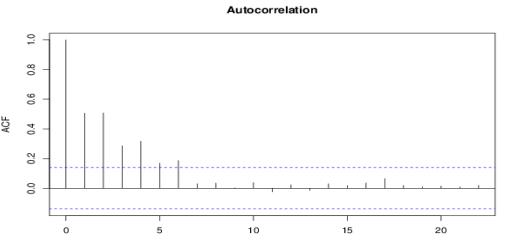
Рисунок 5 – Графічне зображення автокореляційної функції
для осьової сили на долото F
Графік отриманої автокореляційної
функції підтверджує, що досліджуваний процес F(t) є стаціонарним і
ергодичним.
Для одержання
рівняння автокореляційної функції скористаємось програмою Curve Expert. Ввівши
значення, які були розраховані, отримую різні рівняння з різними похибками і
різними коефіцієнтами кореляції. Проаналізувавши всі рівняння, вибираємо
рівняння експоненти:
![]() .
.
Побудуємо графік функції, що описується
даним рівнянням (рис. 6).
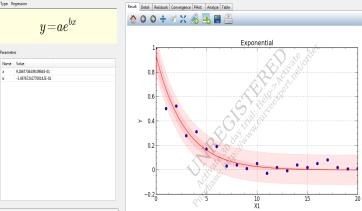
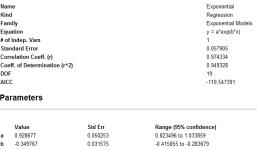
Рисунок 6 – Графічне зображення автокореляційної функції
для осьової сили на долото F при використанні Curve Expert (Exponential)
Як бачимо, графік
повністю відтворюють вище наведену автокореляційну функцію з коефіцієнтом
кореляції r = 0,974 і стандартною похибкою S` = 0,058. Відзначимо, що при
статистичному аналізі стаціонарних випадкових функцій зручно користуватись
спектральною густиною випадкової функції, тобто двохстороннім зображенням Фур’є
автокореляційної функції:
де Rxx
(t) – оригінал автокореляційної функції.
Спектральна густина
є додатною функцією у всьому діапазоні частот від 0 до ¥.
Вона не містить відомостей про фази окремих гармонійних складових. За допомогою
приведеної формули можна визначити спектральну густину по заданій аналітично
автокореляційній функції Rxx (t).
Визначимо
спектральну густину, використовуючи пакет MathCad. Попередньо ми визначили
автокореляційну функцію Rxx (t). Наступним кроком збережемо отримані значення функції в масив даних.
![]()
Далі використаємо
перетворення Фур’є, взявши за основу вбудовану функцію cfft(x):
![]()
Отримане
перетворення потрібно взяти по модулю, оскільки спектральна густина є додатною
у всьому діапазоні частот. Отже:
i=0..length(z)-1, ai=|zi|, ωi=i
По отриманих даних
побудуємо залежність S від w. Так ми отримуємо графік спектральної густини S(w). Модуль значення
спектральної густини визначає амплітудно-частотну характеристику сигналу, а її
аргумент - фазо-частотну характеристику. АЧХ сигналу являється парною функцією,
а ФЧХ – непарною. В загальному вигляді зміст S(w) визначається як
амплітуда сигналу, що припадає на 1 Гц в нескінченно вузькій полосі частот, яка
включає в себе розглянуту частоту w. Отже, маємо графік спектральної густини для сигналу F(t) (рис. 7).
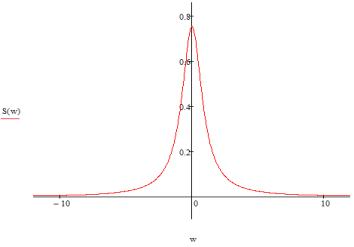
Рисунок 7 – Графік спектральної густини для F(t)
При дослідженні
автоматичних систем виникає необхідність створювати типові випадкові впливи
штучно – за допомогою спеціальних генераторів. Найпростіше ця задача
вирішується з використанням методу формуючого фільтра. Суть методу полягає в
тому, що потрібний випадковий сигнал отримується шляхом пропускання білого шуму
через фільтр з відповідною частотною характеристикою. Частотна передавальна
функція Wф(jω)
фільтра зв’язана з спектральною густиною S(w)
формуючого сигналу наступним співвідношенням [7]:
{Wф(jω)}2= S(w) .
Для пошуку функції Wф(jω) необхідно розкласти
спектральну густину S(w) на
спряжені множники Wф(jω)
і Wф(-jω). З цих двох
множників фізично реалізуємим у вигляді
фільтра є лише перший множник, в якому нулі і полюси (корені чисельника і
знаменника) знаходяться у верхній півплощині.
Для сигналу F(t) з
експоненціальною кореляційною функцією маємо:
S(w)= ![]() .
.
Звідси частотна
функція фізично реалізованого фільтра:
Wф(jω)=![]() .
.
Тоді : Wф(jω)=![]()
Побудуємо графік АФХ
формуючого фільтру для F(t) в програмі MathCad:
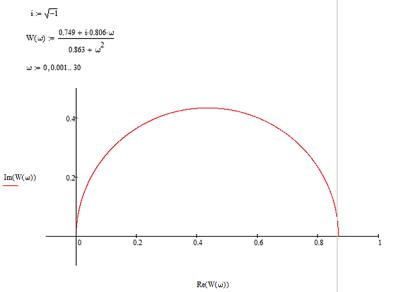
Рисунок 8 – Графік АФХ формуючого фільтру для F(t)
Висновок
Оскільки оператор бурової установки прагне
підтримувати осьову силу на долото постійною з певними флуктуаційними
коливаннями, то оцінка математичного сподівання на таких ділянках постійна, а
реалізація функції осьової сили на долото має вигляд квазістаціонарної
випадкової функції. Проведений аналіз довів, що функція F(t) має властивості
ергодичності як по відношенню до математичного сподівання, так і
автокореляційної функції, що дозволяє досліджувати її статистичні
характеристики на базі реалізації, що має обмежену довжину. Спектральна густина
сигналу F(t) дозволила визначити
амплітудно-фазову характеристику формуючого фільтру.
Література
1. Ушмаев В.И.
Централизованный контроль технологических параметров процесса бурение / В.И.
Ушляев – М.: ВНИИОЭНГ – 1972 – 75 с.
2. Куликовский Л.Ф.
Информационно-измерительные системы для управления процессом бурения / Л.Ф.
Куликовский, В.И. Ушмаев – М.: Недра, 1972 – 175 с.
3. Волгин В.В. Оценка
корреляционных функций в промышленных системах управления / В.В. Волгин, Р.Н.
Каримов – М.: Энергия. - 1979 – 80 с.
4. Гутак О.В. Моделювання функції мети для системи адаптивного оптимального
керування процесом буріння нафтових і газових свердловин долотами нового
покоління / О.В. Гутак // Вісник Хмельницького національного університету
Технічні науки, № 1, 2010 – С. 133-140.
5. Гутак О.В.
Аналіз зв’язків показників ефективності процесу буріння
на засадах системного підходу / О.В. Гутак, Г.Н. Семенцов // Нафтогазова енергетика №2(11) – 2009 – С. 94-99.
6. Семенцов Г.Н. Основи моніторингу технологічних об’єктів нафтогазової галузі:
[навчальний посібник] / Г.Н. Семенцов, М.М.Дранчук,
О.В. Гутак, Я.Р. Когуч, М.І. Когутяк, Я.В. Куровець.– Івано-Франківськ:
ІФНТУНГ, 2010. – 808 с.
7. Семенцов Г.Н. Теорія автоматичного керування: [навчальний
посібник] / Г.Н. Семенцов –
Івано-Франківськ: ІФНТУНГ, 1999. – 611 с.