Доповідь/Технічні
науки – Автоматизовані системи управління на виробництві
УДК 621.313:622.276.53
Семенцова А.О.,
Годлевська
К.С., Копистинський Л.О.
Івано-Франківський
національний технічний університет нафти і газу
УДОСКОНАЛЕННЯ
ХАРАКТЕРИСТИК ЗАНУРНОГО ЧАСТОТНО-РЕГУЛЬОВАНОГО ЕЛЕКТРОПРИВОДА
Одним із напрямків підвищення
продуктивності технологічного обладнання, яке використовується для видобування
нафти за допомогою занурних насосів, а також для буріння свердловин за
допомогою електробурів, є регулювання частоти електроприводів
[1÷4 та ін]. Частотний
спосіб керування розглядається не тільки з точки зору економії споживаної
енергії, але й з позиції удосконалення процесів керування технологічними
процесами буріння і видобування нафти.
Аналіз літературних джерел [1÷4 та
ін] показує, що в процесі розробки частотно-регульованих електроприводів
дослідники використовують все більш сучасні методи і засоби побудови алгоритмів
керування перетворюючими пристроями, але заключна стадія фільтрації вищих
гармонік струму та напруги, що генеруються силовими перетворювачами, як
правило, покладається на додаткові фільтруючі пристрої – електричні фільтри.
Проте, крім питань покращення форми
кривих струму або напруги окремо на вході і виході електроприводів, потребують
додаткових досліджень питання оцінки можливого впливу на динамічні
характеристики занурного електроприводу фільтра, що приєднаний до виходу
інвертора, і струмопроводу, довжиною декілька тисяч метрів, між фільтром і
занурним електродвигуном. Ці питання у такій постановці в нафтогазовій
промисловості ще не вирішені.
Тому метою даної роботи є дослідження
динамічних характеристик занурного електроприводу з урахуванням властивостей
фільтру і струмопідводу в системі «силовий перетворювач частоти (інвертор) –
занурний електродвигун». Розглянемо динамічні характеристики
частотно-регульованого занурного електроприводу в складі системи «силовий
перетворювач частоти (інвертор) – занурний електродвигун», що подана на рис. 1.

Рисунок
1 – Структура системи «силовий перетворювач частоти (інвертор) – занурний
електродвигун»
Наявність фільтру як динамічної ланки в
структурі, що роглядається, веде до зміни таких показників занурного
електроприводу як пусковий і критичний моменти, оскільки послідовно з обмоткою
статора електродвигуна увімкнуті додаткові індуктивність і ємність (рис. 2).
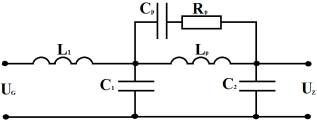
Рисунок 2 – Принципова схема фільтру
Функція передачі цього фільтру визначена [1] у такому вигляді
![]() (1)
(1)
де ![]()
![]()
Параметри
функції передачі (1) визначені для асинхронного двигуна типу М 54/2,
номінальною потужністю 7 кВт з такими
паспортними даними: максимальна напруга – 250 В, число пар полюсів – 2, номінальне
ковзання – 0,12; cos φ = 0,89; ККД = 0,91; перевантажена здатність – 2,5;
кратність пускового струму – 6,5. Тоді фільтр можна
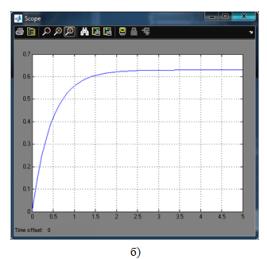
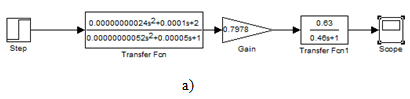
представити у вигляді такої Simulink-моделі (рис.
3а). Перехідна характеристика фільтру наведена на рис. 3б.
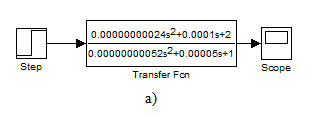
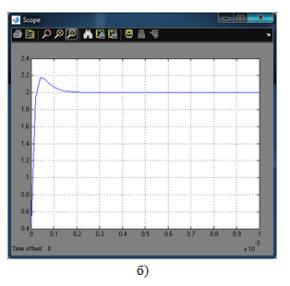
Рисунок 3 – Simulink-модель і
перехідна характеристика фільтру
Simulink-модель двигуна і
його перехідна характеристика наведені на рис. 4а і 4б.
Рисунок
4 – Simulink-модель
і перехідна характеристика двигуна
З урахуванням функції передачі струмопідводу-кабеля
![]() , (2)
, (2)
де R2 – опір ізоляції струмопідводу;
R1 – активний опір кабелю, складено
структурну схему частотно-регульованого занурного електроприводу із складеним
фільтром (рис. 5), його Simulink-модель і
перехідну характеристику системи (рис. 6а, 6б).

Рисунок
5 – Структурна схема частотно-регульованого занурного електроприводу із
складеним фільтром
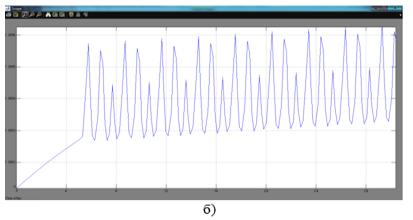
Рисунок
6 – Simulink-модель і
перехідна характеристика занурного частотно-регульованого електроприводу із
складеним фільтром
Як бачимо з рис.
6, в усталеному режимі роботи системи спостерігаються автоколивання з
амплітудою А = 0,03 % і частотою ω ≈ 1 Гц.
Визначимо основні частотні характеристики і зобразмо їх за
допомогою програмних продуктів MathCad і
MathLab.
|
Задана передавальна функція: |

За допомогою програми MathLab
і вкладки Workspace побудували аплітудно-частотну та фазо-частотну
характеристики.
Рисунок
7 – Амплітудно-частотна характеристика занурного частотно-регульованого
електроприводу із складеним фільтром
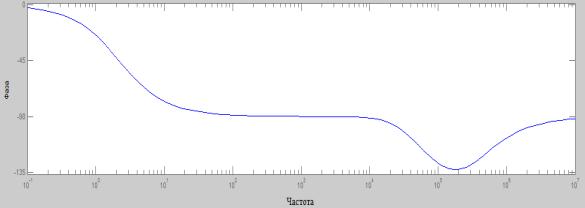
Рисунок
8 – Фазо-частотна характеристика занурного частотно-регульованого
електроприводу із складеним фільтром
|
|
|
|
Тепер за допомогою програми MathCad визначимо
амплітудно-фазову характеристику і дві логарифмічні: амплітудно-частотну та
фазо-частотну характеристики.

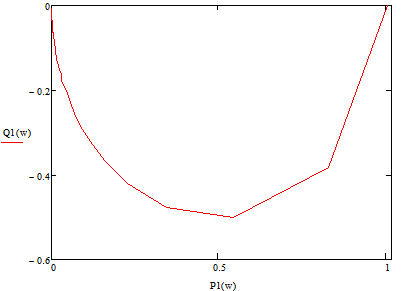
Рисунок
9 – Амплітудно-фазова характеристика занурного частотно-регульованого
електроприводу із складеним фільтром
![]()
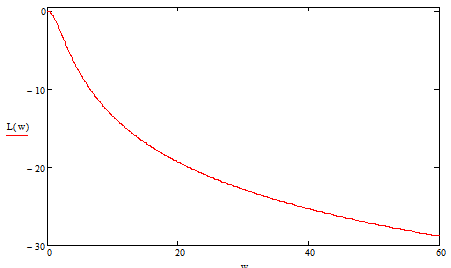
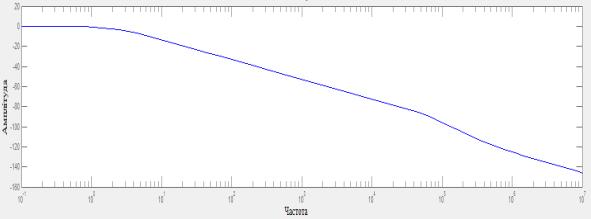
Рисунок
10– Логарифмічна амплітудно-частотна характеристика занурного
частотно-регульованого електроприводу із складеним фільтром
![]() .
.
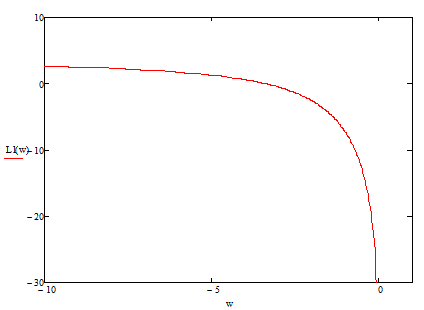
Рисунок
11– Логарифмічна фазо-частотна характеристика занурного частотно-регульованого
електроприводу із складеним фільтром
Висновки
На основі аналізу Simulink-моделей
елементів і системи частотно-регульованого електроприводу із складеним фільтром
отримано їх функції передачі і перехідні характеристики, що дало змогу визначити
функцію передачі приводу, його амплітудно- і фазо-частотні характеристики для
розв’язання задачі удосконалення характеристик частотного регулювання.
Література:
1.
Черный А. П. Анализ статических характеристик частотно регулируемого
электропривода с фильтром на выходе инвертора / А. П. Черный, П. И. Полищук //
Вестник Кременчугского государственного политехнического университета. – 2007.
– Вип. 1. – С. 6-11.
2. Фаттахов К. М.
О диапазоне регулирования частоты электроприводов серийных
погружных центробежных насосов, работающих в сильнообводненных нефтяных
скважинах / К. М. Фаттахов // Автоматизация и метрологическое обеспечение
измерений в нефтяной и газовой промышленности. Межвузовский научно технический
сборник. – Уфа: Изд. Уфимск нефт. ин-та, 1984 – с. 108-112.
3.
Черный А. П. Спасательный фильтр / А. П. Черный, П. И. Полищук, О. С.
Воробейчик // Мир автоматизации. – 2008. - №4. – С. 38-42.
4.
Эфендизаде А. А. Частотное управление электробуром / А. А. Эфиндизаде. – Баку:
Азернешр, 1969. – 261 с.
