Ермолович Д. А., Мовчан А. П.
Национальный технический университет Украины «КПИ»
УПРАВЛЕНИЕ ОБЪЕКТАМИ С БОЛЬШИМ ЗАПАЗДЫВАНИЕМ
Временные задержки (или запаздывания)
довольно часто наблюдаются в промышленных процессах, связанных с
транспортировкой, перемешиванием, горением веществ. Они приводят к тому, что
информация о ходе процесса поступает к регулятору позже, чем это требуется, что
может привести к неустойчивости замкнутой системы. Сложность управления
объектами с временными задержками характеризуется отношением величины
запаздывания к постоянной времени объекта: чем оно больше – тем труднее
добиться требуемого качества регулирования.
Повысить качество управления такими
объектами можно двумя способами:
·
уменьшением запаздывания
в объекте путем внесения конструктивных изменений
·
применением более
сложной структуры системы управления, позволяющей уменьшить негативное влияние
запаздывания.
Одной из структур, предназначенных для
управления объектами с запаздыванием, является предиктор Смита. Его рекомендуют
применять при соотношении величины запаздывания к постоянной времени объекта, описываемом
следующим соотношением [1]:
![]() , (1)
, (1)
где: ![]() - время запаздывания,
- время запаздывания,
![]() - постоянная времени
объекта.
- постоянная времени
объекта.
Структурная схема замкнутой системы
автоматического регулирования (САР) с предиктором Смита приведена на рис. 1, а [2].
Она содержит дополнительный внутренний контур обратной связи с модельным блоком,
в котором содержится модель объекта c
запаздыванием, а также модель объекта без запаздывания. Дополнительный контур
обратной связи формирует сигнал, идентичный такому, который со временем
появится на выходе системы, и подает его на вход регулятора до тех пор, пока не
появится сигнал от главной цепи обратной связи. По мере его возрастания сигнал
с выхода модельного блока уменьшается.
Также для управления объектами с
запаздываниями применяется ППИ (предиктивный пропорционально-интегрирующий) регулятор,
который является модификацией предиктора Смита [3]. Его структурная схема
изображена на рис. 1, б.
 а)
а)
б)
Рис. 1. Структурные схемы САР: а) с предиктором Смита;
б) с ППИ – регулятором
На рисунке 1 приняты следующие
обозначения:
![]() - заданное значение
регулируемой величины;
- заданное значение
регулируемой величины;
![]() - возмущение;
- возмущение;
![]() - текущее значение
регулируемой величины;
- текущее значение
регулируемой величины;
![]() - сигнал рассогласования;
- сигнал рассогласования;
![]() - управляющий сигнал;
- управляющий сигнал;
![]() - сигнал с выхода
модельного блока;
- сигнал с выхода
модельного блока;
![]() - передаточная
функция объекта регулирования;
- передаточная
функция объекта регулирования;
![]() - передаточная
функция регулятора (используется ПИ-регулятор);
- передаточная
функция регулятора (используется ПИ-регулятор);
![]() - передаточная
функция модели объекта;
- передаточная
функция модели объекта;
![]() - передаточная
функция части модели объекта без запаздывания;
- передаточная
функция части модели объекта без запаздывания;
![]() - величина запаздывания модели объекта;
- величина запаздывания модели объекта;
![]() - коэффициент усиления ППИ - регулятора;
- коэффициент усиления ППИ - регулятора;
![]() - инерционная составляющая ППИ – регулятора.
- инерционная составляющая ППИ – регулятора.
По сравнению с предиктором Смита, ППИ –
регулятор медленнее отрабатывает воздействие по заданию или возмущению. В то же
время он является более устойчивым и легче в настройке, т. к. настройке
подлежат только 3 параметра, а не 5 (как в предикторе Смита).
Кроме ППИ – регулятора, известно много
других модификаций предиктора Смита; однако, они не получили широкого
распространения.
Качество регулирования в САР с предиктором
Смита и ППИ - регулятором существенно зависит от точности определения
параметров модели объекта: чем ближе они к действительным значениям, тем лучшего
качества регулирования можно добиться. Соответственно, возникает необходимость построения
системы, которая способна самостоятельно, или при ограниченном участии
обслуживающего персонала, приспособится к текущим условиям работы. Такими
являются системы с контуром оптимизации или адаптивные. Целями создания адаптивных
систем является обеспечение необходимых показателей качества регулирования
объектов при изменении динамических параметров в широких пределах в процессе
нормальной эксплуатации, а также для ускорения и обеспечения точности настройки
систем регулирования при введении объекта в эксплуатацию.
Поэтому исследования были направлены на
нахождение алгоритма оптимального параметрического синтеза (ОПС) для настройки
значений параметров САР с предиктором Смита и ППИ-регулятором. Были созданы
программы, позволяющие провести оптимизацию значений параметров САР с
предиктором Смита и ППИ-регулятором. В качестве метода оптимизации использован метод
Хука-Дживса [4] с небольшим дополнением. Оно заключаются в том, что если в
текущем цикле оптимизации уменьшение критерия оптимизации было достигнуто при
шаге в строну уменьшения значения параметра, то на следующем шаге в первую
очередь делается шаг в том же направлении, и наоборот.
В качестве критериев оптимизации
использовались интегральные критерии, которые в общем виде описывает выражение
(2).
 , (2)
, (2)
где: ![]() - пределы
интегрирования;
- пределы
интегрирования;
![]() - функция цели;
- функция цели;
![]() - сигнал ошибки;
- сигнал ошибки;
![]() - время;
- время;
![]() - постоянные числовые
коэффициенты;
- постоянные числовые
коэффициенты; ![]() ;
; ![]() ;
;
![]() - вектор параметров
САР, которые подлежат оптимизации.
- вектор параметров
САР, которые подлежат оптимизации.
Большинство объектов в промышленности
можно упрощенно описать в виде комбинации апериодического звена первого порядка
и звена запаздывания. Поэтому в исследованиях использовались такие типы объектов, передаточная функция
которых имеет вид (3).
 . (3)
. (3)
где: ![]() - коэффициент усиления объекта;
- коэффициент усиления объекта;
![]() - постоянная времени объекта;
- постоянная времени объекта;
![]() - время запаздывания объекта.
- время запаздывания объекта.
Так как в предикторе Смита необходимо подстраивать
параметры ПИ-регулятора и модели объекта, то для него, прежде всего, были
проведены исследования по нахождению наилучшей последовательности оптимизации.
Проводилась как последовательная оптимизация параметров указанных выше элементов
САР, так и одновременная.
Исследования проводились в следующих двух
случаях:
1)
Когда известны
достаточно точные значения параметров объекта. В этом случае можно сразу задать
значение параметров модели объекта близкими к самому объекту. Поэтому
оптимизируется только ПИ-регулятор. Пример оптимизации в этом случае приведен
на рис. 2, а и рис. 3, а.
2)
Когда неизвестные
приближены значение параметров объекта. Это может быть как при начальной
настройке системы, так и в процессе эксплуатации системы, когда наблюдается
дрейф параметров объекта. Поэтому оптимизируется как модель объекта, так и
ПИ-регулятор. Пример оптимизации в этом случае приведен на рис. 2, б и
рис. 3, б.
Графики, отображающие пример оптимизации
значений параметров, приведены на рис. 2 и 3.
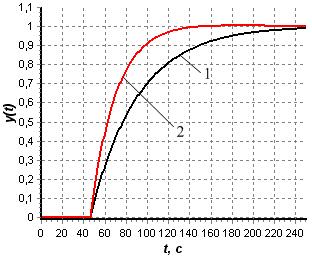
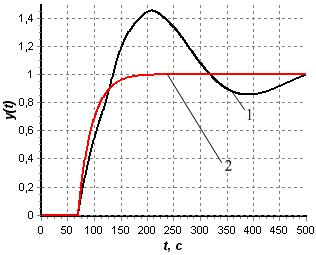
а) б)
Рис. 2. Кривые переходных процессов в САР с
предиктором Смита до оптимизации параметров (кривая 1) и после (кривая 2).
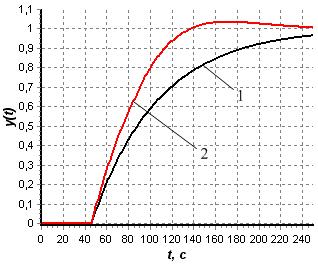
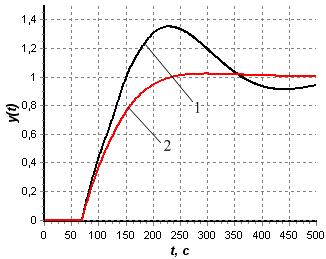
а) б)
Рис. 3. Кривые переходных процессов в САР с ППИ –
регулятором до оптимизации параметров (кривая 1) и после (кривая 2)
Как видим из приведенных выше иллюстраций,
проведение ОПС значений параметров САР позволяет улучшить качество управления
(увеличить скорость установления процесса, уменьшить динамический заброс,
избавится от колебаний).
Наилучшие показатели качества переходного
процесса при наименьшем количестве шагов в результате оптимального
параметрического синтеза достигаются при одновременной оптимизации параметров
ПИ-регулятора и модели объекта в случае предиктора Смита. В случае ППИ-регулятора
оптимизируются одновременно 3 параметра: ![]() .
.
В большинстве случаев наилучшие результаты
(наименьшую динамическую ошибку, время регуляции и степень затухания) были
получены при параметрах критерия ![]() . При увеличении
значения
. При увеличении
значения ![]() увеличивается количество шагов оптимизации,
увеличивается перерегулирование и уменьшается степень затухания, а при
уменьшении – увеличивается время регуляции без существенного увеличения шагов
оптимизации.
увеличивается количество шагов оптимизации,
увеличивается перерегулирование и уменьшается степень затухания, а при
уменьшении – увеличивается время регуляции без существенного увеличения шагов
оптимизации.
Литература
1. Денисенко В. В. ПИД -
регуляторы: принципы построения и модификации // Современные технологии
автоматизации. 2006. № 4. с. 66 - 74; 2007. № 1. с. 78 - 88.
2. Гурецкий Х. Анализ и синтез систем
управления с запаздыванием. – М.: Машиностроение, 1974. – 328 с.
3. Leva
A., Cox C., Ruano A. Hands-on PID autotuning: a guide to better utilization. -
IFAC Professional Brief, http://www.ifac-control.org.
4. Банди Б. Методы оптимизации.
Вводный курс: Пер. с англ. – М.: Радио и связь, 1988. – 128 с.