Технические
науки/автоматизированные системы управления на производстве
К.т.н.
Мерзадинова Г.Т.
Евразийский
университет им. Л. Н. Гумилева, Астана,
Республика
Казахстан
Оценка
пропускной способности каналов передач нижнего уровня ИУС учета энергии на
подвижном
железнодорожном
транспорте
Систему
контроля и учета энергии можно рассматривать как трехуровневую: уровень точек
учета, уровень сбора информации, представительский уровень. Первый
уровень(локальный) включает измерительные трансформаторы тока (ТТ) и
напряжения (ТН), к выходам которых подключены измерительные цепи счетчиков
электроэнергии (СЭЭ); цепи связи выходов счетчика со входами устройства учета
электроэнергии (УУЭ), Сочетание оборудования первого уровня и цепей связи с УУЭ
представляет собой измерительный контур (ИК) ИУС контроля и учета энергии (ИУС
КУЭ). Второй уровень ИУС КУЭ технологически представляется периферийным
устройством связи с объектом (УСО), а третий - центральным пунктом управления с
выделением контура и, как правило, введением для нее отдельного сервера. Второй
и третий уровни представляют собой информационный контур ИУС КУЭ.
Устройство
учета электроэнергии — основа аппаратной части подсистемы ИУС КУЭ, является составной частью
устройства УСО. По входным цепям устройство сопрягается со счетчиками
электроэнергии, В основном, счетчики формируют информационные сигналы по
числоимпульсным выхам канала и кодовым выходам, формируемых как информационные
сообщения в виде последовательных кодов.
Процедурами
обработки полученных кодов значений сигналов от датчиков предусматривается
фиксация различных аварийных ситуации, в т.ч.:
- при скорости изменения
величины входного сигнала, превышающей установленный предел;
- при непоявлении
сигнала в ожидаемый период;
- при наложении сигналов
из разных источников, из-за, например, задержки сигнала/ов в каких либо каналах.
При обнаружении
аварийной ситуации при обработке данных от датчика устройство автоматически
переходит в режим формирования кодовой последовательности, которая включает
заданное число последовательно считываемых значений сигналов от датчика. По
условиям применения период последовательного считывания данных от датчика
задается при адаптации, как правило, не превышает 1 мс. Число получаемых
значений также задается при адаптации устройства и, как правило, не превышает
нескольких десятков. Указанная последовательность сигналов условно названа
«миниосциллограммой».
Кроме того в устройства
предусматривается формирование, при необходимости, нескольких
последовательностей, если, например, фиксируется аварийная ситуация по данным
от нескольких датчиков - в этом случае «миниосциллограммы» образуются для
каждого датчика. После однократного «выбега» текущего значения сигнала от
какого-либо датчика за пределы нормы последовательность аварийных значений
сигналов формируется независимо от реальных значений сигналов, поступивших
после «выбега».
При разработке системы
предстояла необходимость исследования трафика подсистем нижнего уровня во
взаимодействии с верхним уровнем и определения параметров, от которых зависит
интенсивность загруженности сети, зависимости величины интенсивности трафика
каналов передач нижнего уровня ИУС учета энергии на подвижном железнодорожном
транспорте.
Рассматриваемая
система представляет собой комплекс унифицированных информационно- и
программно-совместимых технических средств, объединенных каналами связи, и
предназначен для построения автоматизированных систем управления
технологическими процессами (рисунок 1).
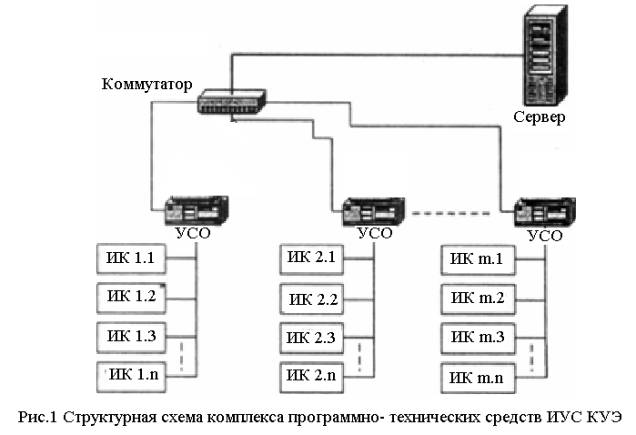
В
качестве технических средств для восприятия и обработки измеренной информации
и решения задач управления на объектах служат измерительные контуры (ИК), а на
диспетчерском пункте управления - персональный компьютер. Связь пункта
управления с контролируемыми пунктами осуществляется посредством, как правило,
проводных каналов связи.
УСО
обеспечивают ввод аналоговых и дискретных сигналов от датчиков объектов управления
и вывод управляющих сигналов на их исполнительные устройства по индивидуальным
каналам дискретной информации.
Функционирование
комплекса осуществляется под управлением специального программного
обеспечения, загружаемого в персональный компьютер пункта управления. Выполняя
операции, предписанные инструкцией программы, осуществляется опрос удаленных
объектов, обработку полученной информации и представление ее оператору. С
помощью этой программы оператор может передать специальные команды на удаленный
пункт на включение или отключение исполнительного оборудования.
Те
или иные применяемые протоколы передачи систем телемеханики определяются
государственным стандартом. Этот стандарт распространяется на устройства и
системы телемеханики с передачей информации кодированной последовательностью
бит для контроля и управления территориально распределенными процессами.
Определяемые процедуры в линии ограничены передачей последовательностей
сообщений с окном, равным единице. Это означает, что уровень канала на
первичной станции (станции, инициирующей передачу сообщений) принимает запрос
на новую передачу только тогда, когда предыдущий принятый запрос выполнен
удовлетворительно или с уведомлением об ошибке. Эти процедуры применимы как
для балансных, так и небалансных передач в системах телемеханики, использующих
полудуплексные или дуплексные каналы связи.
Рассмотрим
параметры трафика системы телемеханики. Согласно стандарту, интенсивность
трафика нижнего уровня системы телемеханики зависит от следующих параметров:
-
число ИК (n);
-
период опроса (Т);
-
таймаут (τ);
-
число заголовка (H);
-
длина тела пакета (L);
-
контрольная сумма (CRC).
Поскольку
протоколы передачи ориентированы на окно, равное единице, процедура обмена
данными происходит следующим образом:
циклически опрашивается ИК, выдавая команды и ожидая ответа. Ответ может
последовать в промежуток времени, называемый таймаутом. Если ответ от ИК не
последовал, то ситуация считается аварийной, выдается сообщение оператору,
и опрашивается следующий ИК.
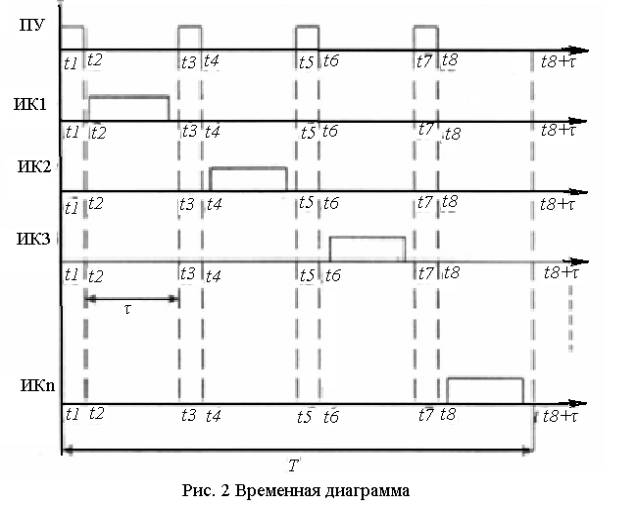
Нормальная
работа системы: в момент времени t1 пульт управления (ПУ)
отправляет УКП1 команду общей длиной H1 + L1
+ CRC1 и начиная с момента времени t2, но не
позднее момента времени t3
должен получить от него отклик H2 + L2
+ CRC2. Затем в момент времени t3 происходит посылка в ИК2 команды общей длиной
Н3 + L3 +CRC3, и начиная с
момента времени t4, но не позднее момента времени t5,
должен получить от него отклик H2+L2 + CRC2.
И так далее до того момента, как в момент времени t(2n -1) ПУ
отправляет ИК n команду общей длиной H2n
-1+L2n -1 + CRC2n -1, и начиная с момента
времени t(2n), но не позднее момента времени t(2n+τ), должен
получить от него отклик Н2n +L2n
+ CRC2n. Вся процедура должна пройти за время, меньшее или равное
периоду опроса Т. Временная диаграмма работы процедуры представлена на
рис. 2.
Определение
целевой функции трафика сети нижнего уровня системы произведена следующим образом.
Опрос всех УКП должен пройти за время, равное Т
= nτ. (1)
Загрузка
сети телемеханики нижнего уровня будет происходить со скоростью
![]() , (2)
, (2)
где Non=
H3+L3 + Hот+Lот+
2CRC- число опросов;
L3
- длина тела пакета запроса;
H3-
длина заголовка пакета запроса;
Lот
- длина тела пакета отклика;
Hот
- длина заголовка пакета отклика.
Эффективно
работающая сеть должна быть загружена на 75%[1]. Таким образом, пропускная
способность сети системы телемеханики нижнего уровня из (1), (2) будет
следующая:
![]() . (3)
. (3)
На
верхнем уровне (ПУ-ПУ, сервер ПУ-ПУ) системы телемеханики данные передаются по
протоколам передачи верхних уровней модели. Этот трафик может быть по классу
отнесен к трафику транзакций.
Заключение
Исследован
трафик систем телемеханики и определены параметры, от которых зависит
интенсивность загруженности сети, а также определена пропускная способность
каналов передач нижнего уровня ИУС учета энергии на подвижном железнодорожном
транспорте сети телемеханики, которая определяется неравенством (3).
Литература
1. Кульгин
М. Технологии корпоративных сетей. - СПб.: Питер, 2000.