Технические науки/ 11.Робототехника.
Бергер
Е.Э., к.т.н., доцент, Рожко О. И.,
Толоконникова Л.А.
Херсонский национальный
технический университет
МЕТОДЫ СИНТЕЗА
ФОРМООБРАЗУЮЩИХ УСТРОЙСТВ
Формообразующие механизмы
Комплексная механизация и автоматизация процессов обработки деталей со сложными криволинейными профилями требуют разработки и внедрения соответствующих методов и устройств, обеспечивающих требуемое относительное перемещение заготовки и инструмента. При этом наиболее прогрессивными являются бескопирные, кинематические методы, при которых инструмент и заготовка связаны определенными кинематическими цепями, то есть формообразующими механизмами.
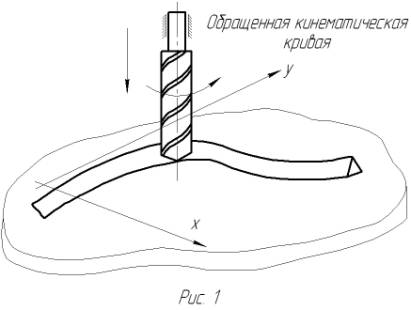
В основе этих механизмов лежат направляющие механизмы, рабочий орган которых совершает сложное движение по заданной криволинейной траектории. Однако при обработке деталей такое сложное движение режущего инструмента вызывает конструктивные трудности, снижает надежность и точность обработки. Следовательно, механическая обработка требует создания устройств, у которых по аналогии с большинством металлообрабатывающих станков заготовка (деталь) подвижна, а режущий инструмент совершает лишь вращательное или поступательное движение относительно неподвижной оси (рис. 1) или оси, совершающей простейшие движения – прямолинейное или круговое.
В настоящие время разработано два метода синтеза таких устройств – метод инверсии и метод вращающейся стойки.
1. Метод инверсии
В основе метода лежит кинематическое обращение движения или, как его называют в ТММ, инверсия. Он состоит в том, что исходный механизм, обеспечивающий перемещение точки подвижного звена (шатуна) по некоторой кривой подвергается следующему преобразованию:
– неподвижное звено – стойка ОС – раскрепляется, то есть раскрепляется два связанных с опорой шарнира О и С. При этом, бывшая ранее неподвижной, плоскость стойки (система координат XOY) становится подвижной и совершает сложное движение. То есть к исходному механизму мы добавили две степени подвижности. Чтобы не изменялась степень свободы механизма, необходимо ранее подвижное звено АB (шатун) вместе с шатунными точками М и М1 закрепить и сделать неподвижным (рис. 2).
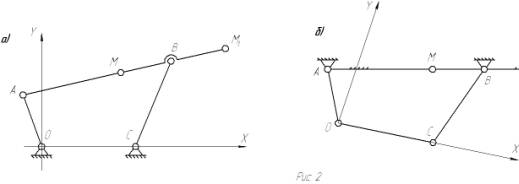
Геометрия механизма и относительное перемещение его звеньев при этом сохраняется. Следовательно, неподвижные точки М и М1 обращенного механизма будут описывать на подвижной плоскости XOY те же кривые, которые воспроизводились на плоскости XOY, этими же точками, связанными
с шатуном исходного механизма. Поэтому такие кривые называются обращенными шатунными кривыми.
Если теперь с подвижной плоскостью механизма XOY связать деталь (заготовку), то она будет совершать определенное движение относительно неподвижных точек М и М1 шатуна. Через эти точки проходит ось режущего инструмента, например, вращающейся фрезы или движущихся возвратно-поступательно резца или долбяка. То есть получаем устройство для обработки криволинейных профилей, обеспечивающие подачу заготовки на инструмент, ось которого не подвижна (рис. 1).
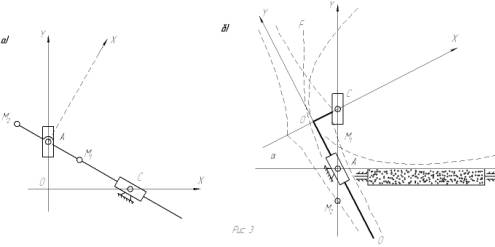
Пример 1. Пусть требуется получить механизм для воспроизведения конхоиды Никомеда и огибания параболы на подвижной плоскости.
Берем за основу известный конхоидальный циркуль (рис. 3а), точки М1, М2 которого описывают заданную кривую, а прямая ОХ огибает параболу. Подвергая ее инверсии, получаем механизм, у которого неподвижные точки М1, М2 и неподвижная прямая АХ обеспечивают образование требуемых кривых относительно подвижной плоскости XOY – рисунок 3б.
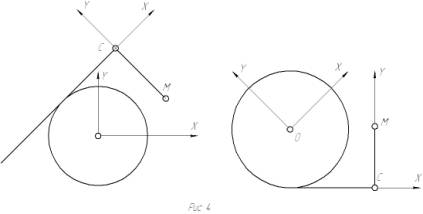
Пример 2. Известно, что механизм рейки, обрабатывающий колесо (рис. 4а) и точки, связанные с рейкой, описывают эвольвенты круга (в частном случае – спираль Архимеда – точка М), а прямая СМ огибает эвольвенту круга.
Преобразовав этот механизм по методу инверсии, получаем механизм колеса, котящегося по рейке (рис. 4б). Очевидно, что неподвижные точки С и М плоскости YСХ и прямая СХ будут образовывать указанные кривые относительно подвижной плоскости связанной с колесом.
2. Метод вращающейся стойки
В металлообрабатывающих станках, во многих автоматах карусельного типа применяется такое относительно перемещение изделия и инструмента – изделие вращается, а инструмент перемещается прямолинейно.
Для синтеза формообразующих устройств с указанным относительным перемещением заготовки и инструмента необходимо стойку раскрепить и соединить ее с основанием шарнирно с возможностью ее вращения вокруг некоторого центра. В частном случае этим центром может быть принят один из шарниров стойки, например С. При этом у исходного механизма появляется одна дополнительная степень подвижности. Чтобы устранить эту лишнюю подвижность, нужно к исходному механизму присоединить группу, имеющую степень свободы, равную минус 1.
Такой группой может служить:
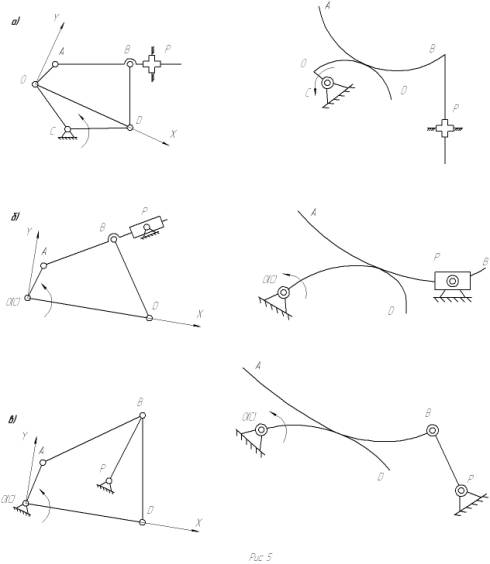
– крестообразный ползун (одно звено с двумя поступательными парами) – рис. 5а.
– ползун с шарниром (одно звено с одной вращательной и одной поступательной парой) – рис. 5б.
– кривошип (одно звено с двумя вращательными парами) – рис. 5в.
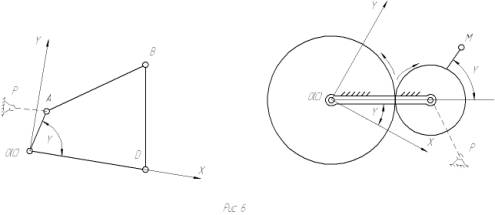
Особого внимания в синтезе машин карусельного типа заслуживает способ преобразования, при котором звено СОD, связанное с вращающейся плоскостью, является ведущим и обобщение координаты исходного и полученного механизма оказываются одинаковыми. Для выполнения поставленного условия необходимо раскрепить стойку исходного механизма так, чтобы она вращалась вокруг шарнира 0 и присоединить звено Р к кривошипу ОА, т. е. закрепить кривошип. Такое преобразование показано на примере шарнирного 4-звенника (рис. 6а) и центроидного планетарного механизма (рис. 6б).
Таким образом в общем случае преобразованный механизм можно получить и без введения дополнительных звеньев. Для этого достаточно в исходном механизме звено, связанное со стойки шарниром, закрепить и вращать стойку вокруг второго шарнира (рис. 6).
В результате получаем механизм, у которого шатунные точки М, М1 описывают относительно вращающейся плоскости XOY связать заготовку, а сточкой М или М1 ось режущего инструмента, то получим формообразующее устройство для обработки криволинейных профилей на вращающейся заготовке.
Пример 1. Преобразуем указанным методом механизм конхоидального циркуля, показанный на рис. 3а. В результате получаем механизм с прямолинейно движущимся звеном 1 и поворотным рычагом 2 (рис. 7).
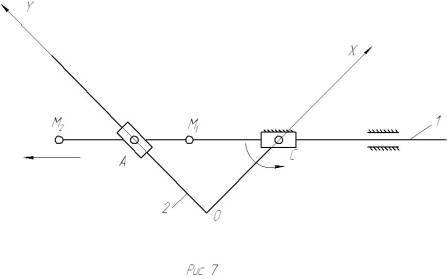
На поворотной плоскости XOY точки М1, М2 звена 1 описывают конхоиды Никомеда, а прямая OХ огибает параболу.
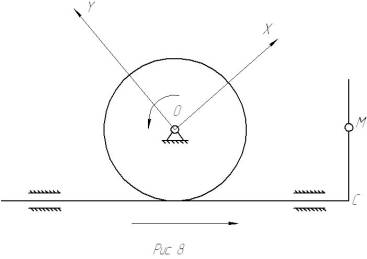
Пример 2. На рис. 4б плоскость колеса XOY совершает сложное движение. Закрепив центр колеса шарнирно и раскрепив рейку, получим механизм, показанный на рис. 8. В этом механизме плоскость XOY вращается, а рейка совершает прямолинейное движение. При этом точки С, М описывают на вращающейся плоскости эвольвенту круга и спираль Архимеда, а прямая СМ огибает эвольвенту круга.
Заключение
На основе анализа методов синтеза бескопирных формообразующих устройств возможна дальнейшая разработка конструкции и проектирование механизмов для обработки сложнопрофильных деталей и манипуляторов промышляемых роботов, а также исследования и конструкторские разработки по внедрению этих устройств в производственную практику с целью механизации и автоматизации технологических процессов.
Литература:
1. Добровольский В.В. Теория механизмов для образования плоских
кривых. М. АНСССР, 1953. -146 с.
2. Артоболевский И.И. Теория механизмов для воспроизведения плоских
кривых. М. АНСССР, 1959. – 260 с.
3. Материалы патентной
литературы, Бергер Э.Г., БергерЕ.Э. и др.
авт. св. №630096, №648452, №1100150, №1100151.