Математические задачи восстановления изображений в подповерхностной радиолокации. Замотайлов О.В. (г. Москва)
1. Актуальность
Вследствие бурного роста
автомобилизации в России при практически постоянной протяженности дорожной сети
многократно увеличились нагрузки на магистральную сеть дорог. Специалисты
считают, что для выполнения качественных проектов ремонта автомобильных дорог
необходимо иметь полное представление о геологическом строении основания
дорожных сооружений. Традиционные методы при инженерно-геологических изысканиях
– бурение скважин – явно недостаточны. В последнее время активно начинают
использоваться приборы подповерхностной радиолокации – георадары.
Отметим, что помимо
большого числа чисто технических проблем в георадиолокации имеет место и ряд
нерешенных методических вопросов, связанных с обработкой и интерпретацией
данных георадарного зондирования дорог. Одним из них является вопрос о влиянии
конечного размера диаграммы направленности антенны (ДНА) георадара (несколько
десятков градусов) на точность воспроизведения структуры подповерхностного
разреза и встречающихся в нем малоразмерных («точечных») объектов.
«Дорожный пирог»
представляет собой совокупность слоев, являющихся некоторыми функциями двух
переменных. В данном докладе рассматривается промежуточная модель,
представляющая собой линейчатую поверхность, перпендикулярное сечение которой,
проходящее вдоль движения георадара – функция одной переменной (Рис. 1).
Рис. 1 Схема георадарного измерения
На Рис. 1 O – положение георадара, M – ближайшая точка, OK ![]() Ox, K
–образ точки M.
Ox, K
–образ точки M.
2. Прямая и обратная задачи.
В докладе рассмотрены
прямая и обратная задачи отображения математической модели «оригинал-образ».
Прямая задача сводится к построению образа ![]() – границы известной
– границы известной ![]() при георадарной обработке и обратная задача –
восстановление
при георадарной обработке и обратная задача –
восстановление ![]() по образу
по образу ![]() .
.
2.1 Прямая задача при ![]() (угол ДНА).
(угол ДНА).
Дана зависимость ![]() , являющаяся
границей раздела слоев.
, являющаяся
границей раздела слоев.
Математической моделью
образа является нелинейное отображение ![]() , которое оригиналу
границы ставит в соответствие ее изображение
, которое оригиналу
границы ставит в соответствие ее изображение
Ошибка, т.е. отклонение
точки оригинала от ее изображения:
![]()
Свойства:
1) Если оригинал –
горизонтальная прямая, то ![]() и
и ![]() . Значит образ и
оригинал совпадают в случае горизонтальных плоских слоев.
. Значит образ и
оригинал совпадают в случае горизонтальных плоских слоев.
2) Пусть ![]() ,
, ![]() . Тогда
. Тогда
![]()
3)
Отображение G отрезок прямой
переводит в отрезок прямой.
Пусть ![]() , тогда
, тогда ![]() ,
, ![]()
2.2 Обратная задача при ![]() (угол ДНА).
(угол ДНА).
Обозначим через ![]() образ отображения
образ отображения ![]() . Предположим, что
. Предположим, что ![]() - полученное изображение границы. Обратная
задача состоит в том, чтобы восстановить оригинал
- полученное изображение границы. Обратная
задача состоит в том, чтобы восстановить оригинал ![]()
Учитывая отображение G,
получим нелинейное дифференциальное уравнение
![]()
![]() В частности, если
В частности, если ![]() - линейная функция, ,то уравнение имеет
вид
- линейная функция, ,то уравнение имеет
вид
![]()
Следовательно, справедливо следующее утверждение:
![]() При существует единственная
линейная функция, являющаяся решениями нелинейного ОДУ первого порядка.
При существует единственная
линейная функция, являющаяся решениями нелинейного ОДУ первого порядка.
2.3 Влияние ДНА, полученные
результаты.
В частном случае, если угол
ДНА = 0, то образ прямой полностью совпадает оригиналу.
Так как угол ДНА антенны
георадара накладывает ограничения на поиск минимального расстояния, были
разработаны и программно реализованы алгоритмы решения прямой и обратной задачи
с учетом произвольного угла ДНА.
Алгоритм решения прямой
задачи. Оригинал представляет собой графическое изображение, имеющее белый фон
и массив пикселей черного цвета, расположенных в произвольных точках. В
качестве параметров задается уровень антенны - горизонтальная прямая,
совпадающая с траекторией движения георадара и угол ДНА. В каждой точке
траектории антенны сектор ДНА попиксельно обрабатывается, последовательно
записывая в массив расстояния от уровня антенны до границы раздела в каждой
точке вхождения оригинала в сектор ДНА. После этого выбирается минимальное
значение из этого массива. Данное расстояние откладывается на прямой,
перпендикулярной траектории георадара. (Рис. 2) Для оценки точности построения образа, в каждой точке рассчитываются
ошибки ![]() .
.
![]()
![]()
![]()
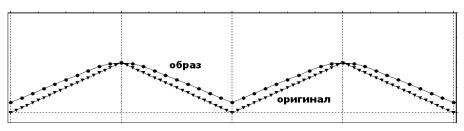
Рис. 2 Решение прямой задачи.
Линейно-гиперболический сплайн.
Алгоритм решения обратной задачи основывается на
следующих аспектах:
1) В частном случае, если образ является прямой,
параллельной траектории георадара, то оригинальная поверхность совпадает с
образом при любом угле ДНА.
2) Если образ располагается под постоянным углом
к траектории антенны георадара, то оригинальная поверхность является прямой,
пересекающей образ в точке его пересечения с траекторией антенны георадара. На
рис.3 представлена схема решения обратной задачи для данного случая. Так как R –
минимальное расстояние до оригинальной поверхности, то реальная точка
оригинальной поверхности должна находиться на окружности радиуса R в
пределах сектора ДНА антенны георадара.
Минимальное расстояние от антенны георадара в точке A до
оригинальной поверхности будет находиться в точке касания прямой, проходящей
через точку пересечения оригинала и образа, окружности с радиусом R –
точка B. (Рис. 3)
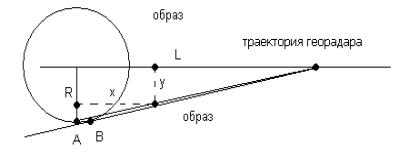
Рис. 3 Схема решения обратной задачи
Если данная точка находится внутри сектора ДНА,
то она и является искомой точкой оригинальной поверхности.
Если данная точка находится вне сектора ДНА,
тогда искомая точка оригинальной поверхности будет находиться на ребре сектора.
3) Для границы раздела произвольной формы, образ
представляется в виде n прямых с постоянным
шагом дискретизации. При этом обратная задача решается для каждой из n-прямых.
Для данного алгоритма существует ограничение восстановления оригинала. Если
участок на образе представляет собой переход из убывающей функции в
возрастающую с углом φ, то на восстановление оригинала накладывается
условие φ > (2π – α)/2,
где α – угол ДНА. Для упрощения реализации алгоритма вводится
предположение, что данное условие всегда истинно.
Пример решения обратной задачи и оценка точности
алгоритма:
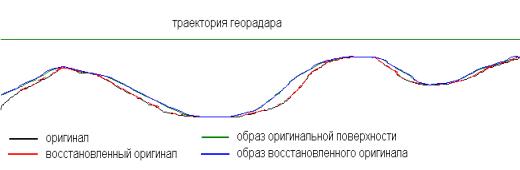
Рис. 4 Решение обратной задачи
Рассчитанная средняя разность расстояний от
траектории георадара до образа оригинальной поверхности и образа
восстановленного оригинала составила 0,65, что в задачах интерпретации
георадиолокационных данных является допустимой погрешностью.
3. Литература.
1. Буслаев А.П., Егоров В.В., Поспелов П.И.,
Яшина М.В. Естественно-научные задачи применения приборов подповерхностной
радиолокации для мониторинга автомобильных дорог – М: Вестник МАДИ, 2008,
№1(12).
2. Буслаев А.П., Замотайлов А.В., Поспелов П.И., Яшина М.В.
О восстановлении слоев дорожной одежды по данным подповерхностной радиолокации
(ч.1) – М: Вестник МАДИ, 2009, №2(17).
3. Замотайлов О.В. Задачи распознавания
изображений прибора подповерхностной радиолокации на базе мобильной дорожной
лаборатории – М: T-COMM, 2010, №6