Доповідь/Технічні науки –
Автоматизовані системи управління на виробництві
УДК 681.05.03: 621.3.005
Семенцова А.О., Ужелин Я.А., Лагойда А.І.
Івано-Франківський національний
технічний університет нафти і газу
Результати АналізУ
динаміки регулювання процесу буріння нафтових і газових свердловин
електробурами
Аналіз динамічних властивостей
системи автоматичного регулювання потужності на валі двигуна електробура є
актуальним науково–прикладним завданням у зв’язку з необхідністю удосконалення
режимів роботи зануреного електропривода долота і необхідністю підвищення
продуктивності бурових установок [1,2,3,4].
Проте аналіз літературних джерел
(наприклад, [1-5 та ін.]) вказує на недостатній об’єм
проведених досліджень в контексті вивчення динамічних властивостей систем
автоматичного регулювання потужності на валі двигуна електробура. Це
пояснюється тим, що процес буріння свердловин електробурами, як об’єкт
керування, відноситься до класу слабко визначених об’єктів, що мають нелінійні
статичні і динамічні характеристики. Завдання керування таким нелінійним
динамічним об’єктом, що розвивається в часі, функціонує за умов апріорної та
поточної невизначеності щодо його структури та параметрів і перебуває під
впливом зовнішніх завад, є однією з ключових у сучасній теорії керування.
Метою даної роботи є аналіз
динаміки регулювання процесу буріння нафтових і газових свердловин сучасними
електробурами за умов дії факторів невизначеності.
Методи дослідження базуються на
використанні методів математичної статистики для дослідження взаємозв’язків
собівартості метра проходки з параметрами режиму буріння, методів комп’ютерного
моделювання для дослідження системи керування в програмному середовищі Matlab, методів теорії автоматичного
керування для аналізу стійкості системи регулювання.
Інформаційною базою є наукові
праці вітчизняних і зарубіжних спеціалістів, результати експериментальних
досліджень на бурових підприємствах.
З існуючих наукових досліджень
[1, 2, 5 та ін.] відомо, що кількісною оцінкою ефективності технологічного процесу
буріння вертикальних, похило скерованих та розгалужено-горинтальних свердловин
є собівартість метра проходки, яка визначається за відомим [1, 2, 5] виразом:
![]()
де: ![]() - вартість однієї
години роботи бурової установки;
- вартість однієї
години роботи бурової установки;
![]() - час, що
витрачається на спуско-підіймальні і допоміжні операції;
- час, що
витрачається на спуско-підіймальні і допоміжні операції;
![]() - тривалість процесу
поглиблення;
- тривалість процесу
поглиблення;
![]() - вартість долота;
- вартість долота;
![]() - проходка на
долото.
- проходка на
долото.
Проте встановити аналітичну
залежність ефективності буріння свердловини електробурами від значення
потужності на долоті досить важко. Тому були використані експериментальні дані
для геолого-технічних умов буріння свердловин на Прикарпатті.
Побудовані за цими даними лінії
регресії ![]() і
і ![]() апроксимувались
декількома рівняннями за допомогою програми Curve Expert 1.3.
апроксимувались
декількома рівняннями за допомогою програми Curve Expert 1.3.
В табл. 1 наведено результати
апроксимації експериментальних залежностей ![]() математичними
моделями програмного модуля Curve Expert 1.3.
математичними
моделями програмного модуля Curve Expert 1.3.
Перевагу для лінії регресії ![]() було надано рівнянню
(рис.1)
було надано рівнянню
(рис.1)
![]() (1)
(1)
де: ![]() - потужність на
долоті;
- потужність на
долоті;
![]() - механічна швидкість
буріння;
- механічна швидкість
буріння;
![]() ,
, ![]() ,
, ![]() ,
, ![]() - коефіцієнти моделі.
- коефіцієнти моделі.
Параметри рівняння (1) визначені
методом найменших квадратів, коефіцієнт кореляції для якого дорівнює 0,988.
Лінію регресії ![]() апроксимували
рівняннями, які наведені нижче (табл.2).
апроксимували
рівняннями, які наведені нижче (табл.2).
Перевагу було надано рівнянню Logistic Model (рис.2)
![]() (2)
(2)
де: ![]() - собівартість метра
проходки;
- собівартість метра
проходки;
![]() - потужність на долоті;
- потужність на долоті;
![]() ,
, ![]() - коефіцієнти моделі.
- коефіцієнти моделі.
Коефіцієнт кореляції для даної
моделі дорівнює 0,969.
Аналіз рівняння (2), довів, що
зниження собівартості метра проходки можливе за рахунок збільшення потужності,
що підводиться до вибою свердловини. Оскільки сучасні електробури Е-127, Е-164,
Е-190, Е-215, Е-240,
Е-290 [6] мають обмежену потужність електродвигунів, то доцільна її
стабілізація під час поглиблення свердловини.
Таблиця 1 -
Результати апроксимації залежності ![]() математичними моделями програмного модуля Curve Expert 1.3
математичними моделями програмного модуля Curve Expert 1.3
|
№ |
Тип моделі |
Рівняння |
Коефіцієнти моделі |
Показники точності апроксимації
|
|
1 |
3rd
degree Polynomian Fit |
|
|
|
|
2 |
Reciprocal
Model |
|
|
|
Продовження табл.1
|
3 |
Modified
Power |
|
|
|
|
|
4 |
Geometric
Fit |
|
|
|
|
|
5 |
Logistic
Model |
|
|
|
|
|
6 |
Gaussian
Model |
|
|
|
|
|
7 |
Quadratic
Fit |
|
|
|
|
|
8 |
Richards
Model |
|
|
|
|
|
9 |
Reciprocal
Quadratic |
|
|
|
|



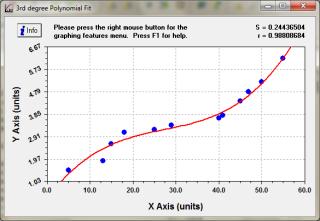
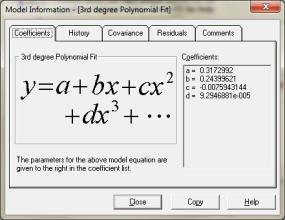
Рис. 1.
Робочі вікна програмного модуля Curve Expert 1.3 апроксимації залежності ![]()
Слід зауважити, що регулятори
подачі долота типу АВТ-2, які забезпечують стабілізацію активної складової
струму статора двигуна електробура або осьової сили на долото, мають значну
статичну похибку, яка сягає 19%. Крім того встановлено [5], що вони мають низьку чутливість
до зміни осьової сили на долото. Тому було запропоновано [1] як керовану величину використати
активну потужність двигуна електробура.
Таблиця 2 -
Результати апроксимації залежності ![]() математичними моделями програмного модуля Curve Expert 1.3
математичними моделями програмного модуля Curve Expert 1.3
|
№ |
Тип моделі |
Рівняння |
Коефіцієнти моделі |
Показники точності
апроксимації |
|
1 |
Logistic
Model |
|
|
|
|
2 |
Harris
Model |
|
|
|
|
3 |
Saturation
Growth - Rate Model |
|
|
|
|
4 |
Reciprocal
Quadratic |
|
|
|
|
5 |
Quadratic
Fit |
|
|
|
|
6 |
Sinusoidal
Fit |
|
|
|




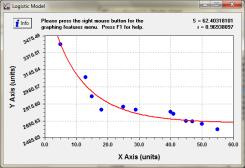
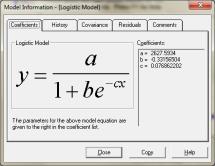
Рис. 2. Робочі вікна програмного модуля Curve Expert 1.3
апроксимації залежності ![]()
Для уточнення структурної схеми
системи регулювання потужності на валі занурного електродвигуна досліджено
функцію передачі електробура як одного із елементів комплексної динамічної
системи, що складається із колони бурильних труб, струмопідводу електробура і
вибою свердловини.
Встановлено [5], що двигун електробура має таку
функцію передачі:
 (3)
(3)
де: ![]() - коефіцієнт передачі
двигуна електробура;
- коефіцієнт передачі
двигуна електробура;
![]() - електромеханічна
стала часу.
- електромеханічна
стала часу.
Оскільки розрахунковими методами
визначити числові значення параметрів ![]() і
і ![]() неможливо,
застосували експериментально-аналітичний
спосіб, що заснований на використанні рівняння Вінера-Хопфа:
неможливо,
застосували експериментально-аналітичний
спосіб, що заснований на використанні рівняння Вінера-Хопфа:
![]() (4)
(4)
де: ![]() - взаємна кореляційна
функція між сигналами, пропорційними осьовій силі на долото
- взаємна кореляційна
функція між сигналами, пропорційними осьовій силі на долото ![]() і активної потужності
електробура
і активної потужності
електробура ![]() ;
;
![]() - автокореляційна
функція вхідного сигналу;
- автокореляційна
функція вхідного сигналу;
![]() - імпульсна перехідна
функція, що однозначно визначає функцію передачі
- імпульсна перехідна
функція, що однозначно визначає функцію передачі
![]() (5)
(5)
Отже, задачею є пошук на базі
відомих реалізацій випадкових процесів ![]() ,
, ![]() автокореляційної
функції осьової сили на долото
автокореляційної
функції осьової сили на долото ![]() , взаємної кореляційної функції осьової сили на долото і
активної потужності
, взаємної кореляційної функції осьової сили на долото і
активної потужності ![]() , розв’язання інтегрального рівняння (4) відносно імпульсної
перехідної функції і визначення функції передачі із виразу (5).
, розв’язання інтегрального рівняння (4) відносно імпульсної
перехідної функції і визначення функції передачі із виразу (5).
Ідентифікація функції передачі
двигуна електробура проведена на основі експериментальних даних, одержаних під
час буріння вертикальної ділянки свердловини №814Д електробуром Е250-10 в
однорідних породах на глибині 215-717 м. В умовах експерименту не врахували
незначні втрати потужності в струмопідводі, а також вважали силу тертя колони
бурильних труб зі стінкою свердловини
сталою.
В результаті було встановлено,
що:
- автокореляційна функція ![]() має тенденцію до замикання,
що характеризує поглиблення свердловини як ергодичний випадковий процес;
має тенденцію до замикання,
що характеризує поглиблення свердловини як ергодичний випадковий процес;
- періодична складова
автокореляційної функції ![]() характеризує буріння,
як процес, обумовлений кінематикою шарошкового долота, м’якою підвіскою колони
бурильних труб та ін.;
характеризує буріння,
як процес, обумовлений кінематикою шарошкового долота, м’якою підвіскою колони
бурильних труб та ін.;
- проходження максимуму взаємної
кореляційної функції ![]() через нуль вказує на
відсутність запізнення в системі.
через нуль вказує на
відсутність запізнення в системі.
В результаті розв’язання рівняння
(5) отримано вираз для функції передачі по каналу «осьова сила на долото F – активна потужність двигуна електробура Р»:
 (6)
(6)
Рівняння (6) характеризує
динамічні властивості послідовного з’єднання таких ланок: давача сили; колони
бурильних труб; двигуна; струмопідводу і давача активної потужності:
![]()
Оскільки осьова сила на долото
передається через колону бурильних труб, а вимірювання осьової сили і активної
потужності здійснюється на поверхні, то функція передачі двигуна електробура
може бути визначена із співвідношення:
 (7)
(7)
де: ![]() ,
, ![]() ,
, ![]() ,
, ![]() - функції передачі
колони бурильних труб, струмопідводу, давачів сили і активної потужності
відповідно.
- функції передачі
колони бурильних труб, струмопідводу, давачів сили і активної потужності
відповідно.
Проведена оцінка динамічних
властивостей елементів, які входять до виразу (7), показала, що для умов
експерименту бурильну колону можна вважати безінерційною ланкою.
Давач осьової сили на долото,
який конструктивно складається із перетворювача ДВР-2б і безконтактного
сельсина БД404А, також є безінерційною ланкою.
Оскільки електромагнітні сталі
часу обмотки двигуна електробура (0,002-0,004с) і давача активної потужності
(0,02с) малі, ними знехтували.
Функція передачі струмопідводу
визначена для схеми заміщення з перерізом кабелю 50мм2. Оскільки
значення електромагнітної сталої часу струмопідводу дорівнює ![]() , то цією величиною знехтували.
, то цією величиною знехтували.
Тоді функція передачі
струмопідводу приймає такий вигляд:
 (8)
(8)
де: ![]() - активний опір кабелю,
Ом;
- активний опір кабелю,
Ом;
![]() - опір ізоляції
струмовідводу, Ом.
- опір ізоляції
струмовідводу, Ом.
Оскільки ![]() , то можна вважати, що
, то можна вважати, що ![]() .
.
Враховуючи сказане, можна
стверджувати, що функція передачі двигуна електробура визначається за формулою
(6).
В результаті проведеного аналізу
удосконалено структурну схему системи стабілізації потужності на валі двигуна
електробура, яка наведена на рисунку 3.
Функція передачі замкнутої
системи за задаючим впливом ![]() дорівнює:
дорівнює:
 (9)
(9)
Оскільки для аналізу динамічних
властивостей системи автоматичного регулювання потрібне її характеристичне рівняння,
то прирівняємо до нуля знаменник (9)
![]() (10)
(10)
і після підстановки конкретних значень параметрів функції
передачі [5] для інтервалу буріння
2073-2177,6 м отримаємо таке характеристичне рівняння:
 (11)
(11)
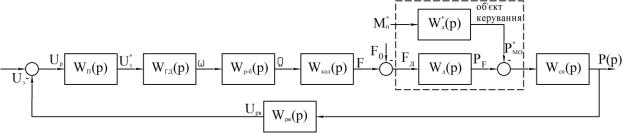
Рис. 3.
Структурна схема системи автоматичного регулювання потужності на валі двигуна
електробура: ![]() - еквівалентна
функція передачі підсилювачів;
- еквівалентна
функція передачі підсилювачів; ![]() - функція передачі
системи «генератор - двигун» привода подавання долота;
- функція передачі
системи «генератор - двигун» привода подавання долота; ![]() - функція передачі
сукупності механічних елементів – редуктора і барабана лебідки;
- функція передачі
сукупності механічних елементів – редуктора і барабана лебідки; ![]() - функція передачі
колони бурильних труб;
- функція передачі
колони бурильних труб; ![]() - функція передачі
двигуна електробура за збуренням
- функція передачі
двигуна електробура за збуренням ![]() ;
; ![]() - момент опору;
- момент опору; ![]() - функція передачі
давача потужності на валі двигуна електробура
- функція передачі
давача потужності на валі двигуна електробура
Проаналізуємо стійкість системи
автоматичного керування (САК), властивості якої описуються характеристичним
рівнянням (11).
Оскільки всі коефіцієнти
характеристичного рівняння більші нуля (![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ), то це означає, що необхідні умови стійкості системи
виконуються.
), то це означає, що необхідні умови стійкості системи
виконуються.
Для перевірки достатніх умов
стійкості скористались критерієм Михайлова.
Для побудови кривої Михайлова
проведемо підстановку ![]() в рівнянні (11). В
результаті отримаємо:
в рівнянні (11). В
результаті отримаємо:

Виділимо дійсну та уявну частину:
![]()
![]()
Для побудови годографа
використаємо програму Mathcad. В результаті проведеного
моделювання отримали криву Михайлова (рис.4).
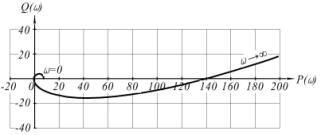
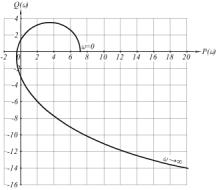
Рис. 4.
Крива Михайлова для оцінки стійкості системи автоматичного регулювання
Оскільки крива Михайлова
проходить ![]() квадрантів і охоплює
початок координат, можемо зробити висновок, що система є стійкою.
квадрантів і охоплює
початок координат, можемо зробити висновок, що система є стійкою.
В результаті проведення
відповідних досліджень методом Михайлова можемо стверджувати, що система є
стійкою, оскільки дане характеристичне рівняння задовольняє усім досліджуваним
достатнім умовам стійкості.
Для виявлення поведінки системи
регулювання при зміні параметрів окремих ланок проведемо аналіз властивостей
системи автоматичного керування методом кореневих годографів.
Оскільки кореневий годограф – це
траєкторія коренів характеристичного рівняння (полюсів функції передачі), коли
визначений її параметр змінюється, то кореневий годограф n-го порядку – це
сукупність n гілок, які описуються n коренями
характеристичного рівняння, коли визначений її параметр змінюється безперервно
протягом всього можливого діапазону його значень.
Відзначимо, що метод кореневого
годографу дає змогу оцінити чутливість полюсів САР до зміни будь-якого її
параметра.
Цей метод є графічним і дозволяє
отримати якісну інформацію про стійкість САР та її динамічних показників.
Для знаходження коренів рівняння
(11) при зміні параметра ![]() від 1 до 5 скористаємося критерієм Ляпунова, який
описаний в програмному пакеті Mathcad.
від 1 до 5 скористаємося критерієм Ляпунова, який
описаний в програмному пакеті Mathcad.
Проведені розрахунки дозволили
побудувати кореневий годограф, утворений при зміні коефіцієнта ![]() (рис. 5).
(рис. 5).
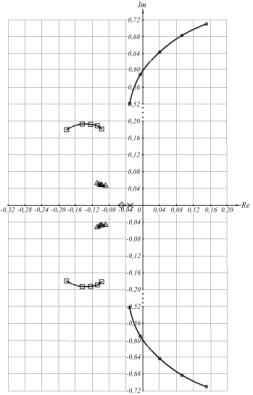
Рис. 5. Траєкторії
коренів характеристичного рівняння (11) при зміні коефіцієнта ![]() :
: ![]() - перший корінь;
- перший корінь; ![]() - другий корінь;
- другий корінь; ![]() - третій корінь;
- третій корінь; ![]() - четвертий корінь;
- четвертий корінь; ![]() - п’ятий корінь
- п’ятий корінь
З
аналізу траєкторій, наведених на рисунку 5, бачимо, що п’ятий корінь
характеристичного рівняння суттєво впливає на стійкість САР і може перевести її
в область нестійких режимів роботи.
Для
оцінювання якості процесу регулювання визначимо перехідну функцією ![]() , тобто зміну вихідної величини в часі після подавання на
вхід одиничного ступінчастого впливу за нульових початкових умов.
, тобто зміну вихідної величини в часі після подавання на
вхід одиничного ступінчастого впливу за нульових початкових умов.
Врахуємо, що перехідна функція ![]() має дві складові:
вимушену
має дві складові:
вимушену ![]() і вільну
і вільну ![]() :
:
![]() .
.
Вимушена
складова ![]() дає частковий
розв’язок рівняння при ступінчастому впливі. Вона дорівнює усталеному значенню
вихідної величини при
дає частковий
розв’язок рівняння при ступінчастому впливі. Вона дорівнює усталеному значенню
вихідної величини при ![]() :
:
![]() .
.
Вільна
складова ![]() знаходиться із
розв’язку однорідного диференційного рівняння:
знаходиться із
розв’язку однорідного диференційного рівняння:
![]()
де: ![]() – корені
характеристичного рівняння;
– корені
характеристичного рівняння;
![]() – постійні
інтегрування, які залежать від початкових умов.
– постійні
інтегрування, які залежать від початкових умов.
Корені характеристичного рівняння
(11) знайдені вище за критерієм Ляпунова, алгоритм якого записаний в
програмному пакеті Mathcad.
Оскільки характеристичне рівняння
має пари комплексних спряжених коренів ![]() і
і ![]() , то в таких випадках для окремої пари значення вільних
складових буде наступним:
, то в таких випадках для окремої пари значення вільних
складових буде наступним:
![]()
Враховуючи дані припущення,
отримали значення вільної складової:

Враховуючи отримані результати,
на рисунках 7 та 8 наведено результати моделювання перехідної та імпульсної
перехідної характеристик в програмному пакеті Matlab за допомогою структурної схеми, наведеної на рисунку 6.
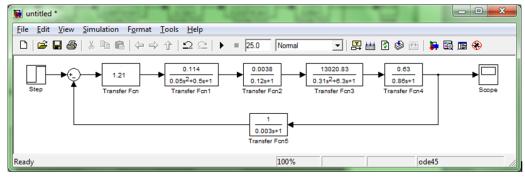
Рис. 6.
Структурна схема системи регулювання, змодельована в середовищі Matlab
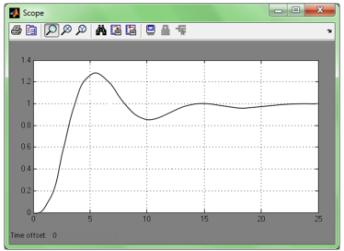
Рис. 7.
Перехідна характеристика системи регулювання:
 ; час регулювання -
; час регулювання - ![]() ; час досягнення максимального значення -
; час досягнення максимального значення - ![]() ; час наростання перехідної характеристики -
; час наростання перехідної характеристики - ![]() ; максимальне значення перехідної характеристики
-
; максимальне значення перехідної характеристики
- ![]() ; кількість коливань - 2
; кількість коливань - 2
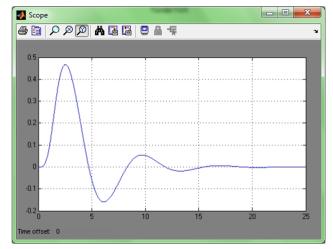
Рис. 8.
Імпульсна перехідна характеристика системи регулювання
Висновок
За результатами проведених досліджень системи
автоматичного регулювання потужності на валу двигуна електробура Е250-10
доведено, що вільний рух системи є стійким, що підтверджується
експериментальними даними.
Моделювання в середовищі Matlab траєкторій коренів характеристичного рівняння, а також
перехідної та імпульсної перехідної характеристики системи дало змогу визначити
параметри перехідного процесу.
Література:
1. Семенцова А.А. Энергетические показатели и повышение эффективности
использования погружного электропривода при бурении скважин: автореф. дис. на
здобуття наук ступеня канд. техн. наук: спец. 05.09.03 – электрооборудование
(промышленость) /А.А. Семенцова – Свердловск, 1984. – 19с.
2. Фоменко Ф.Н. Бурение скважин электробурами / Ф.Н.
Фоменко // - М.:Недра,1974.-260с.
3. Бунчак З. Електробур. Парадокси і реальність. / З.
Бунчак, О. Дудар, О. Кекот, О. Турянський // Електроінформ.-2003.-№4.-С.8-11.
4. Балденко Ф.Д. Автоматизирование системы управления режимом бурения
скважин забойными двигателями /Ф.Д. Балденко, А.П. Шмидт // Бурение и
нефть.-2003.-№4.-С.14-17.
5. Ситников Н.Б.. Зависимость эффективности бурения
глубоких скважин от мощности на долоте / Н.Б. Ситников, А.А Семенцова, В.Т.
Трапезников // Горний журнал.-1987.-№1.-С.53-55.
6. Електробури. Загальні технічні умови. ДСТУ 3258-95 (ГОСТ
15880-96)-К.: Держстандарт України, 1997.-25с.
