Cand.Tech.Sci. Ignatyev V.V., Cand.Tech.Sci. Kobersi I.S.,
Shapovalov I.O.
Southern Federal University, Russia
Fuzzy
control system in an automatic and automated production
One
of the most important tasks at the present time in the development of fuzzy control
systems in automatic and automated production facilities is to improve the
quality and efficiency of control.
As
rule, this problem can be solved only within the modernization projects of the
existing facilities. It should be noted that instability of the object control
and ever-changing requirements for quality regulation prevent to increase of
efficiency of control and quality of regulation.
To
solve those tasks now, a fuzzy logic is widely used, which allows in
combination with the classical methods to successfully solve the task of
increasing the quality of the control actions on the object.
When
you create a fuzzy controller, in which systems control with industrials
regulators are used as a reference, a modified fuzzy inference algorithm, which
allows to minimize a set of rules of fuzzy inference is used [1].
Any
company in upgrading its facilities tends to maximize savings. In article the
approach to the creating of fuzzy control system, based on the knowledge gained
from the previous control system is considered.
Such
knowledge can be: system deviation; differential of a deviation; integral of a
deviation; acceleration deviation.
Depending
on the selection of the variables used to build the fuzzy system and developed
algorithms of interaction, the required control action on the object is formed.
Described
above can be represented graphically in the following figure.
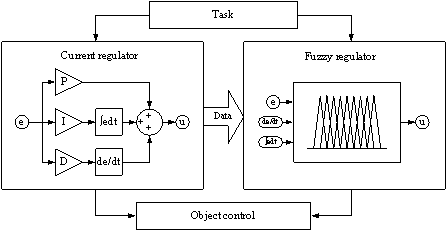
Pic. 1 – The block
diagram of the system control
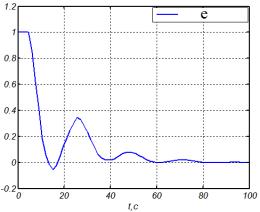
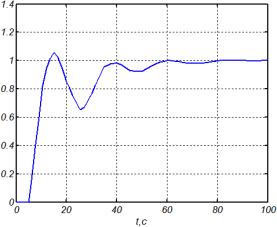
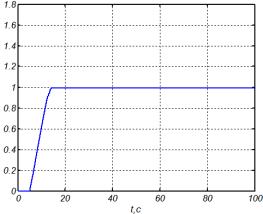
Let charts of
change of the following signals of the PID-regulator be known (pic. 2 – 5).
For the synthesis of fuzzy model it is enough to have only two signals. In our
case it is system deviation and differential of a deviation of system.
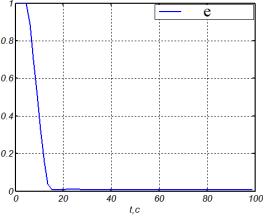
|
Pic. 2 – Deviation of the signal change |
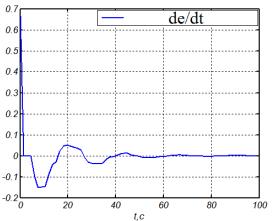
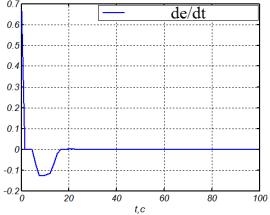
Pic. 3 – Change
of differential of a deviation |
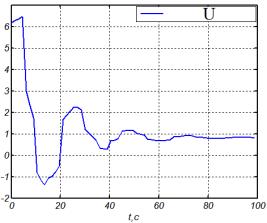
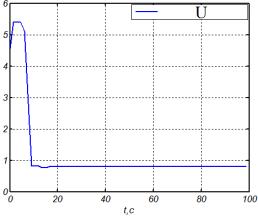
|
Pic. 4 – The
change of the control signal |
Pic. 5 – Transition process |
According to the
signals a fuzzy control system is synthesized, which is based on a modified
Mamdani algorithm with a minimum set of rules of inference. As a result, the
following charts were obtained.
|
Pic. 6 –
Deviation of the signal change |
Pic. 7 – Change
of differential of a deviation |
|
Pic. 8 – The
change of the control signal |
Pic. 9 – Transition process |
Obviously, a
fuzzy model based on the data obtained in the synthesis and simulation of the
classic model, improves the quality of the transition process.
Bibliographical list:
1. Ignatyev, V.V. Применение нечетких регуляторов, в
которых в качестве эталонных используются системы управления с промышленными
регуляторами [Text] / V.V. Ignatyev, I.S. Kobersi // Методы
и средства адаптивного управления в электроэнергетике: тематический выпуск // Известия
ЮФУ. Технические науки. – Таганрог: Изд-во ТТИ ЮФУ, 2013. № 2 (139) – 261 c.,
С. 123-127.