Галямова А.А., ст.
преподаватель
Костанайский
государственный университет имени А. Байтурсынова
Схема расстановки рабочих органов
тяжелого культиватора
Для определения влияния схемы
расстановки рабочих органов тяжелого культиватора на основные показатели его
работы были проведены опыты. Установка для проведения опытов (рис. 1) состоит
из основной массивной рамы 1, опирающейся на лыжи 2, вспомогательной рамы 3,
соединенной с основной посредством параллелограммного механизма 4. На
продольных брусьях вспомогательной рамы
с помощью передвижных кронштейнов 5 устанавливаются рабочие органы 6
культиватора. Соединение с трактором – с помощью прицепа 7, шарнирно связанного
с основной рамой.
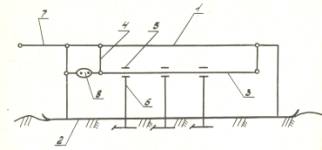
Рисунок 1. Схема экспериментальной установки для
исследования вариантов схем расстановки рабочих органов
Усилие, действующее на рабочие органы,
регистрируется тензозвеном 8, установленным между основной и вспомогательной
рамами. Установка позволяет бесступенчато изменять расстояние по ходу между
рабочими органами и производить энергетическую оценку вариантов схем. При этом
исключаются помехи: от трактора (шарнирный прицеп), от микрорельефа поля
(лыжи), от деформации рамы (вспомогательная рама имеет жесткость брусьев на
порядок больше, чем у серийных орудий).
Опыты проводились на черноземной почве с влажностью 41% и твердостью 3,25 Мпа.
Определялись следующие показатели: среднеквадратичное отклонение глубины
обработки, сопротивление почвы, сохранение стерни, гребнистость поверхности
поля при скорости движения 2,5 м/с и глубине обработки 12-14 см. Ошибка
измерений определялась по критерию Стъюдента [1].
Было испытано четыре варианта схем
расстановки рабочих органов (рис. 2): клиновая «углом вперед», клиновая «углом
назад», трехрядная шеренговая, четырехрядная шеренговая. В результате испытаний
получены зависимости, характеризующие влияние расстояние по ходу движения между
рабочими органами на агротехнические и энергетические показатели работы.
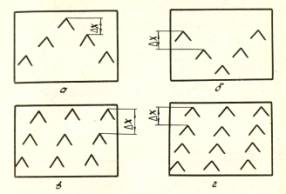
Рисунок 2. Влияние схем расстановки рабочих
органов: а - клиновая «углом вперед»,
б - клиновая «углом назад», в - трехрядная шеренговая, г - четырехрядная шеренговая.
Анализ (рис. 3) показывает, что
полученные зависимости имеют синусоидальный характер с максимум при 25-35 см и
минимум при 45-55 см между рядами рабочих органов. Наилучшую устойчивость по глубине,
характеризуемую средним квадратичным отклонением (σ) имеет трехрядная
шеренговая схема при ∆х < 55 см. Разница в показателях гребнистости
(Г) поверхности поля составляет не
более 7%, что находится в пределах ошибки опыта.
Все варианты схем не удовлетворяют
агротехническим требованиям по гребнистости (не более 6 см).
По сохранению стерни (С) несколько
лучшие показатели имеет клиновая схема «углом вперед» при расстоянии по ходу
между рабочими органами в пределах 45-55 см. Наименьшее тяговое сопротивление (R) у
всех вариантов схем наблюдается по ходу при расстоянии 45-55 см.
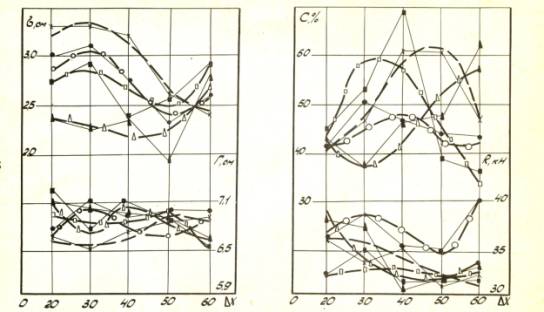
Рисунок 3 Зависимости среднего квадратичного
отклонения (σ), гребнистости поля (Г), сохранения стерни (С), тягового
сопротивления (R) от расстояния по ходу между рядами рабочих
органов. Схемы расстановки: