С.В. Селезнева,
И.И. Коновалова
Пензенский государственный технологический университет
МОДЕЛИРОВАНИЕ АЛГОРИТМА ЭКСТРЕМАЛЬНОГО
РЕГУЛЯТОРА ПОДАЧИ ВОЗДУХА В ТОПКУ
Важное место в
теории САО занимают алгоритмы
импульсных (шаговых) помехозащищенных быстродействующих систем для управления
инерционными объектами (энергетическими и химическими установками, ракетными
двигателями и т.п.) [1]. Основная проблема при реализации таких алгоритмов в
реальном времени заключается в обеспечении устойчивости вычислений решения
системы линейных алгебраических уравнений (СЛАУ) при идентификации.
Предлагается решать СЛАУ
и усреднять результаты вычислений на основании рекуррентного метода наименьших
квадратов (РМНК) [3]. Эффективность предложенного алгоритма оптимизации
исследуется методом статистических испытаний.
Рассмотрим модель
объекта, которая состоит из последовательно соединенных: экстремального звена
(нелинейная часть) с априори неизвестной характеристикой
![]() (1)
(1)
звена чистого запаздывания
с известной величиной запаздывания τ и линейной части, описываемой
разностным уравнением n-го порядка с
соответствующими начальными условиями и коэффициентами, зависящими от времени:
![]() (2)
(2)
где
y(k) –
выход модели (временного ряда) в k-й
момент времени; e(k) – последовательность
независимых, одинаково распределенных случайных величин с нулевым математическим
ожиданием и единичной дисперсией (белый шум); {ai(k), i = 1, n} –параметры авторегрессии; {bj(k), j=1,
m} – параметры скользящего среднего; s – дискретное запаздывание.
Предполагается, что канал
измерения выхода объекта, находится под воздействием помехи e(k), которая
является центрированным случайным процессом.
Если в k-ый момент времени изменить входную величину модели на ![]() , то через некоторое время, определяемое запаздыванием s и временем переходного процесса d на
выходе появится отклик
, то через некоторое время, определяемое запаздыванием s и временем переходного процесса d на
выходе появится отклик ![]() . Величину этого отклика можно рассчитать, решив совместно
уравнения (1) и (2).
. Величину этого отклика можно рассчитать, решив совместно
уравнения (1) и (2).
Неизвестные параметры
уравнений можно определить, используя рекуррентную процедуру метода наименьших
квадратов (РМНК), линеаризуя f(x) в окрестности
параметров текущего k-ого шага.
Алгоритм
РМНК может быть представлен в следующем виде
![]() , (3)
, (3)
![]() , (4)
, (4)
![]() , (5)
, (5)
где ![]() – вектор параметров
модели;
– вектор параметров
модели;
![]() - вектор данных;
- вектор данных;
 – вектор коррекции;
– вектор коррекции;
 –
весовая матрица;
–
весовая матрица;
![]() – весовая матрица,
рассчитанная на следующем шаге;
– весовая матрица,
рассчитанная на следующем шаге; ![]() ;
;![]() – начальные значения переменных.
– начальные значения переменных.
Алгоритм САО ускоренного
поиска экстремума статической характеристики инерционного объекта, в котором
используется прогнозирование установившегося значения переходного процесса (2)
по измерениям y(k) с использованием рекуррентной процедуры (3 - 5)
имеет вид:
![]() (6)
(6)
На рисунках 1-3 показаны результаты
моделирования алгоритма (6). В процессе моделирования в результате
многократного подбора был выбран шаг поиска равный 48, 3 м3/час. Как
видно из рисунка использование разработанного алгоритма обеспечивает устойчивую
работу системы в области максимальных значений температуры.
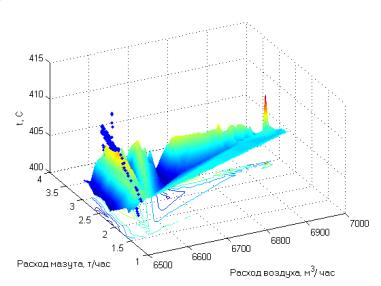
Рис.1.
Расчетная зависимость температуры топочных газов от подачи топлива и воздуха
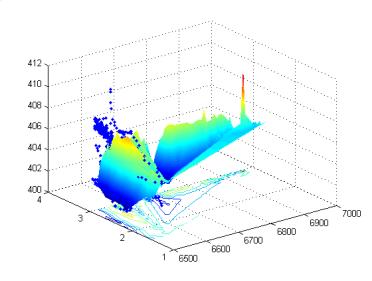
Рис.2.
Результат моделирования рекуррентного шагового алгоритма
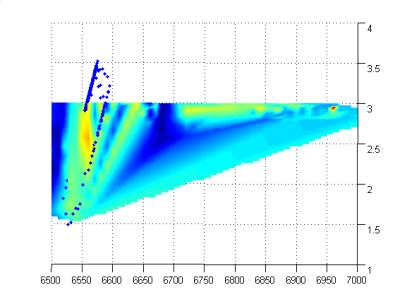
Рис.3. Область поиска глобального экстремума
Список литературы
1. Методы робастного, нейро-нечеткого и адаптивного
управления / под ред. Н.Д. Егупова. – М.: Изд – во МГТУ им. Н.Э. Баумана, 2001.
-744 с.
2. Л.А. Растригин. Системы экстремального управления.
М.: Наука, 1974.
– 323 с.
3. Р. Изерман. Цифровые системы управления.- М.: Мир,
1984.- 541 с.