К.т.н, доцент
Айнагулова А.С., магистрант Оразова А.А.
Евразийский национальный
университет имени Л.Н. Гумилева, Казахстан
Сложные
динамические системы (космические объекты) и построение наблюдателя для искусственного спутника Земли (ИСЗ)
В данной
работе рассматривается сложные динамические системы, модель углового движения
искусственного спутника Земли (ИСЗ) и построение наблюдателя для искусственного спутника Земли (ИСЗ) в классе
однопараметрического структурно-устойчивого отображения. Как космический объект можно рассматривать космического летательного аппарата (КЛА). Космический летательный
аппарат предназначен для полёта в
космос или в космосе, например ракеты-носители (космические ракеты), искусственные спутники Земли (ИСЗ) и др. небесных тел. Также космический летательный
аппарат относятся к сложным динамическим системам. Сложной системой (СС)
называется система, включающая большое число взаимодействующих элементов
(подсистем) и обеспечивающая решение достаточно сложной (комплексной) задачи. К
таким системам относятся информационные сети (телефонные, локальные, Интернет),
транспортные сети, производственные процессы, системы управления сложными
(многоканальными, нелинейными, неопределенными) динамическими объектами
(например, воздушными и космическими объектами).
Рассмотрим упрощенную модель углового движения
искусственного спутника Земли (ИСЗ) относительно продольной оси, рис.1.1.
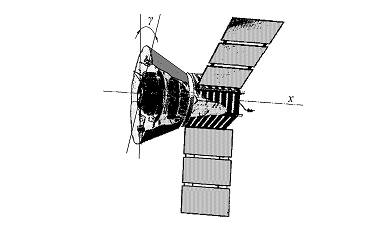
Рисунок 1.1
Искусственный спутник Земли
Обозначим через ![]() - угол и угловую
скорость крена ИСЗ;
- угол и угловую
скорость крена ИСЗ; ![]() - момент инерции ИСЗ
относительно продольной оси x;
- момент инерции ИСЗ
относительно продольной оси x;
![]() - управляющий момент
относительно этой оси, развиваемый, например, реактивными двигателями.
Уравнение динамики вращательного движения и кинематическое соотношение,
связывающее угол и угловую скорость будет иметь вид:
- управляющий момент
относительно этой оси, развиваемый, например, реактивными двигателями.
Уравнение динамики вращательного движения и кинематическое соотношение,
связывающее угол и угловую скорость будет иметь вид:
 (1.1)
(1.1)
Для данной системы n = 2, m = 1. Вектор состояния
определяется сопоставлением компонентов значений угла и угловой скорости:  . А матрицы векторов состояния и управления будут иметь
следующий вид соответственно:
. А матрицы векторов состояния и управления будут иметь
следующий вид соответственно:
 .
.
Вид
матрицы С определяется тем, какие
переменные измеряются или относительно каких из них формулируется цель
управления. Если измеряется только угол крена, то l = 1 и ![]() . Если измеряются обе переменные, то l
= 2,
. Если измеряются обе переменные, то l
= 2,  .
.
Рассмотрим
случай, когда l = 1. Введя переменные ![]() , уравнение (1.1)
можно записать в виде
, уравнение (1.1)
можно записать в виде
 (1.2)
(1.2)
Запишем
систему (1.2) следующим образом
 (1.3)
(1.3)
Для
системы (1.3) наблюдатель будет описываться следующим уравнением
 (1.4)
(1.4)
Матрицу L выберем в виде
![]()
где 
Исследуем
работу наблюдателя рассматривая ошибку оценивания ![]() . Для этого вычтем из (1.3) уравнение (1.4), учитывая
введенную матрицу L
. Тогда получим следующее уравнение для ошибки
. Для этого вычтем из (1.3) уравнение (1.4), учитывая
введенную матрицу L
. Тогда получим следующее уравнение для ошибки
 (1.5)
(1.5)
где источниками ошибки ε(t)
является начальное рассогласование ![]() .
.
Исследуем
поведение процесса ε(t). Система (1.5)
обладает следующими стационарными состояниями:
![]() (1.6)
(1.6)
![]() (1.7)
(1.7)
Систему
(1.5) запишем в развернутой форме
 (1.8)
(1.8)
Линеаризуем систему (1.8)
 (1.9)
(1.9)
При стационарном
состоянии (1.6) система (1.9) примет вид:
 (1.10)
(1.10)
Находим характеристическое уравнение системы
(1.10)

Отсюда следует, что условием устойчивости
системы (1.9) является условие ![]() .
.
Рассмотрим
устойчивость системы для других стационарных состояний. Тогда при стационарных
состояниях (1.7) система (1.9) будет иметь вид:
 (1.11)
(1.11)
Характеристическим уравнением системы (1.11)
будет следующее уравнение

Следовательно, система (1.11) будет устойчива
при ![]() .
.
Из
полученных условий ясно, что система (1.8) становится устойчивой как при
отрицательном, так и при положительном k1.
Результаты
численного эксперимента при различных значениях k1 и сравнительный анализ при выборе матрицы L, когда ошибка
оценивания изменяется по линейному закону, т.е. когда система (1.5) имеет вид:
 (1.12)
(1.12)
Численные эксперименты реализованы с помощью
программного комплекса Matlab.
Рисунок
1.2
Рисунок 1.3
Рисунок 1.4
Рисунок 1.5
Литература:
1. Боднер В. А. Системы управления
летательными аппаратами. М.: Машиностроение, 1973.502 с.
2. Бейсенби М.А., Айнагулова А.С. Оценка
переменных состояний и построение робастно устойчивых наблюдателей в классе
структурно-устойчивых отображений // Вестник ЕНУ им. Л.Н.Гумилева. Серия
математика, информатика и механика. – 2008. - №4. – Б. 14-27.
3. Бесекерский В.А., Попов Е.П. Теория систем
автоматического регулирования. – М.: Наука, 1975. – 768 с.
4. Попов Е.П. Теория линейных систем
автоматического регулирования и управления. – М.: Наука, 1986. – 256 с.