Садовская О.И.
Белорусский государственный университет информатики и
радиоэлектроники, Беларусь
Синтез управления дискретной системы на ориентированном графе
Рассмотрим общее решение задачи синтеза
управления дискретной системой, описываемой множеством логических уравнений с
временным параметром. Определим состояние некоторой системы S в
форме векторов ![]() . Разрядные переменные
. Разрядные переменные ![]() принимают следующие
значения: 0,1,* (значение * интерпретируется как неопределенность). Имеются
операторы
принимают следующие
значения: 0,1,* (значение * интерпретируется как неопределенность). Имеются
операторы ![]() , каждый из которых в общем случае можно представить с
помощью двух векторов:
, каждый из которых в общем случае можно представить с
помощью двух векторов: ![]() . Первый из этих векторов определяет, в каких (или каком)
состоянии оператор можно применять. Например, если этот вектор имеет вид
<**110>, то оператор можно применить в любом состоянии, где разрядные
переменные
. Первый из этих векторов определяет, в каких (или каком)
состоянии оператор можно применять. Например, если этот вектор имеет вид
<**110>, то оператор можно применить в любом состоянии, где разрядные
переменные ![]() равны соответственно
1,1 и 0, а значения разрядных переменных
равны соответственно
1,1 и 0, а значения разрядных переменных ![]() во внимание не
принимаются. Второй вектор
во внимание не
принимаются. Второй вектор ![]() определяет, как
изменяет данный оператор состояние системы.
определяет, как
изменяет данный оператор состояние системы.
Операторы, будучи применены к текущему состоянию
системы, переводят ее в новое состояние согласно следующему правилу:
1. Пусть текущее состояние ![]() и применяется
оператор
и применяется
оператор ![]() . Вектор
. Вектор ![]() должен
соответствовать состоянию
должен
соответствовать состоянию ![]() , т.е. в тех разрядах, где
, т.е. в тех разрядах, где ![]() или
или ![]() значение
значение ![]() и
и ![]() соответственно либо
соответственно либо ![]() (в этом последнем случае значение
(в этом последнем случае значение ![]() во внимание не
берется).
во внимание не
берется).
2. Новое состояние системы
будет ![]() , причем
, причем
![]()
Таким образом, можно поставить следующую общую
задачу. Даны исходное ![]() и конечное
и конечное ![]() состояния и набор
управляющих векторов
состояния и набор
управляющих векторов ![]() . Требуется построить цепочку управляющих векторов,
переводящих систему из состояния
. Требуется построить цепочку управляющих векторов,
переводящих систему из состояния ![]() в состояние
в состояние ![]() . Под цепочкой управляющих векторов понимается
последовательность
. Под цепочкой управляющих векторов понимается
последовательность ![]() . Операторы применяются последовательно, слева направо,
причем условия их применения должны выполняться. Рассмотрим
следующую систему операторов:
. Операторы применяются последовательно, слева направо,
причем условия их применения должны выполняться. Рассмотрим
следующую систему операторов:
![]()
![]()
![]()
![]()
![]()
![]()
Сформируем
результирующие векторы для этих операторов:
![]()
![]()
![]()
![]()
![]()
![]()
Сформируем
граф предшествования (рис. 1):
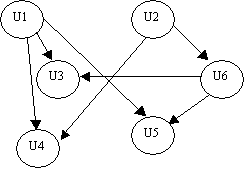
Рис.1. Граф
предшествования
В этом
графе нет циклов. Пусть ![]() ,
, ![]() . Будем строить результирующий
управляющий кортеж. Подбираем управляющий оператор для последнего состояния –
. Будем строить результирующий
управляющий кортеж. Подбираем управляющий оператор для последнего состояния – ![]() . Подходят два оператора
. Подходят два оператора ![]() и
и ![]() . Это означает, что можно начать
строить две последовательности операторов:
. Это означает, что можно начать
строить две последовательности операторов: ![]() ,
, ![]() .
.
Начнем
с ![]() и получаем новое целевое состояние:
и получаем новое целевое состояние: ![]() . Однако у оператора
. Однако у оператора ![]() есть предусловие, которое должно быть выполнено в момент старта:
есть предусловие, которое должно быть выполнено в момент старта: ![]() . Это состояние следует совместить с
предварительной новой целью
. Это состояние следует совместить с
предварительной новой целью ![]() . Получим новое целевое состояние,
которое должно быть достигнуто в момент выполнения оператора
. Получим новое целевое состояние,
которое должно быть достигнуто в момент выполнения оператора ![]() :
: ![]() . В этом случае ни один из
операторов применить нельзя. Следовательно, построение цепочки
. В этом случае ни один из
операторов применить нельзя. Следовательно, построение цепочки ![]() блокируется. У нас остается цепочка
блокируется. У нас остается цепочка ![]() . Как и выше, находим
предварительное новое состояние:
. Как и выше, находим
предварительное новое состояние: ![]() . C
учетом условия срабатывания оператора
. C
учетом условия срабатывания оператора ![]() получаем новое целевое состояние –
получаем новое целевое состояние – ![]() . К этому новому состоянию применимы
операторы:
. К этому новому состоянию применимы
операторы: ![]() ,
, ![]() ,
, ![]() . Это дает нам сразу три цепочки.
Рассмотрим первую из них:
. Это дает нам сразу три цепочки.
Рассмотрим первую из них: ![]() . Здесь применим оператор
. Здесь применим оператор ![]() :
: ![]() .
.
Предварительная
цель: ![]() . С учетом условия срабатывания
получим окончательно:
. С учетом условия срабатывания
получим окончательно: ![]() . Ни один оператор не подходит для
этой цели. Цепочка обрывается. Рассматриваем следующий вариант
. Ни один оператор не подходит для
этой цели. Цепочка обрывается. Рассматриваем следующий вариант ![]() .
.
![]() .
.![]() . Теперь подходит только оператор
. Теперь подходит только оператор ![]() . Получаем:
. Получаем: ![]() .
. ![]() .
. ![]() . Мы видим, наконец, что исходное
состояние
. Мы видим, наконец, что исходное
состояние ![]() включено в
включено в ![]() . Это означает, что результирующее
построение получено и искомая последовательность имеет такой вид:
. Это означает, что результирующее
построение получено и искомая последовательность имеет такой вид: ![]() .
.
Оценка
сложности этого варианта синтеза определяется как оценка числа путей в графе.
Разумеется, это оценка чересчур завышена. Тем не менее, пусть ![]() – число тупиковых вершин в графе,
– число тупиковых вершин в графе, ![]() – число тупиковых вершин в подграфе исходного графа, получающихся
исключением первых
– число тупиковых вершин в подграфе исходного графа, получающихся
исключением первых ![]() тупиковых вершин и т.д. Тогда число путей не превышает:
тупиковых вершин и т.д. Тогда число путей не превышает:
![]() ,
,
![]() .
.
Можно
использовать оценку вида ![]() , где
, где ![]() – число вершин в
графе,
– число вершин в
графе, ![]() – число слоев
(предполагается, что каждый предыдущий слой связан только с очередным
последующим слоем). Значение в скобках указывает среднее число вершин в слое, теоретически
– на возможность экспоненциального роста числа путей, например, при
– число слоев
(предполагается, что каждый предыдущий слой связан только с очередным
последующим слоем). Значение в скобках указывает среднее число вершин в слое, теоретически
– на возможность экспоненциального роста числа путей, например, при ![]() .
.
Однако
все зависит от конкретной задачи, поэтому при отсутствии циклов нужно принимать
во внимание число путей. Если граф предшествования имеет вид дерева, то эта
ситуация наилучшая и с точки зрения вычислительных затрат оценивается по числу
вершин в дереве. Но даже и при наличии циклов ситуация может быть вполне
благоприятной с вычислительной точки зрения.
Подобного
рода алгоритмы могут использоваться в задачах типа отыскания пути на местности.
Литература:
1. Нильсон Н. Искусственный
интеллект: методы поиска решений =
Problem-solving Methods in Artificial Intelligence / Пер. с англ. В. Л.
Стефанюка; под ред. С. В. Фомина. – М.: Мир, 1973. – С. 70- 80.
2. Герман, О.В. Одна
полиномиально разрешимая задача синтеза поведения интеллектуального робота /
О.В. Герман, Д.В. Семерюк // Автоматика и телемеханика. – 2001, №2. – С. 15-
24.
3. Герман, О.В. Синтез
управляющего алгоритма в системе продукционных правил с временным параметром /
О.В. Герман, Д.В. Занько // Автоматика и телемеханика. – 2003, № 5. – С. 41-52.