Технічні науки/ 12.Автоматизовані системи керування на виробництві
К.т.н.
Урбанюк Є.А., магістр Романчук О.Д.
Хмельницький
національний університет, Україна
Вдосконалення пневматичного
крокового двигуна для приводу робочих органів промислових роботів
Пневматичний
привод робочих органів роботів-маніпуляторів завжди займав і в даний час займає
важливе місце в робототехніці.
Більшість промислових роботів
з цикловим програмним
управлінням використовують для
переміщення робочих органів пневматичні циліндри. Проте, однією із проблем
промислового робота з таким приводом є надання робочому органу дискретного
руху, при якому значно полегшується вирішення задач створення систем керування
промисловими роботами і їх програмного забезпечення. Ця проблема вирішується
застосування в приводах механізмів промислових роботів з обертальним рухом пневматичних
крокових двигунів.
На
основі запропонованої винаходом Л.П. Рибака і А.П. Шовкуна конструкції (А.с.
№260639, Бюл. №32, 1978) був створений пневматичний кроковий двигун з
еластичними шлангами, що призначався для використання у механізмі повороту
промислового робота, який згодом був удосконалений заміною комутаційного пристрою
керування пневматичним вібраційним приводом.
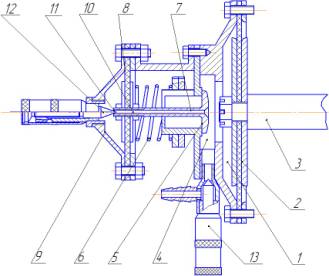
Пневматичний
вібраційний привод (рис. 1) складається з робочої камери 1 з діафрагмою 2, до
якої жорстко прикріплений шток 3, що забезпечує зв'язок з робочим органом. Робоча камера 1 з'єднана з
клапанною камерою 4, всередині якої розміщений клапан 5, притиснутий до сідла
пружиною 6. Клапан 5 жорстко зв'язаний зі штоком 7, що закріплений у жорсткому
центрі діафрагми 8 керуючої камери 9. Циліндричний канал 10, виконаний в штоку
7, закінчується конічним сідлом 11, яке контактує із конічною поверхнею штифта
12, що встановлений всередині керуючої камери з можливістю осьового
переміщення. Клапанна камера 4 зв'язана з вхідним дроселем 13.
![]() Привод працює в наступний
спосіб: через вхідний дросель 13 стиснене повітря, попадаючи всередину
клапанної камери 4 і в робочу камеру 1, впливає на діафрагму 2. Через канал 10
стиснене повітря наповняє керуючу камеру 9 і, взаємодіючи з діафрагмою 8,
відкриває клапан 5. При цьому стиснене повітря виходить з камер 1, 4 і 9 в
атмосферу.
Привод працює в наступний
спосіб: через вхідний дросель 13 стиснене повітря, попадаючи всередину
клапанної камери 4 і в робочу камеру 1, впливає на діафрагму 2. Через канал 10
стиснене повітря наповняє керуючу камеру 9 і, взаємодіючи з діафрагмою 8,
відкриває клапан 5. При цьому стиснене повітря виходить з камер 1, 4 і 9 в
атмосферу.
З
камери 9 повітря виходить через канал 10, але так як клапан 5 і шток 7
переміщаються в напрямку до робочої камери 1, то вихідний перетин каналу 10 в
області сідла 11 збільшується і стиснене повітря з камери 9 виходить значно
швидше. Це приводить до асиметричних коливань діафрагми 2 камери 1.
Застосування пневматичного
вібраційного приводу для керування роботою пневматичного крокового двигуна
дозволить суттєво підвищити надійність його роботи.
ЛІТЕРАТУРА:
1.
Промышленные роботы: конструирование и применение / Г.А.
Спыну; Под ред. докт. техн. наук В.И. Костюка. – К.: Вища шк., 1985. – 176с.
2.
Козырев Ю.Г. Промышленные роботы: Справочник. – М.:
Машиностроение, 1983. – 376с.
3.
Захарова В.І., Васильєва М.П. Промислові роботи.–М.:
1998. – 328с.
4.
Костюк В.И., Гавриш А.П., Ямпольский Л.С., Карлов А.Г.
Промышленные роботы. Конструирование, управление, эксплуатация. Учебное пособие
для студентов технических вузов. К: Вища шк., 1985. – 359 с.