Анализируя структурные
схемы электронных систем управления Курниаван Фарохаджи, студент гр. 141471/01и, кафедра Э, ТулГУ
Научный руководитель: Степанов В.М., д.т.н., про.
Анализируя
структурные схемы электронных систем управления (ЭСУ), можно выделить общие и
специфические функциональные блоки, используемые как в аналоговых, так в
цифровых и микропроцессорных системах управления ДПТ в приводах группы
вспомогательного электрооборудования автомобилей (рис. 1). В состав ЭСУ
обязательно входят датчики, формирующий каскад, блок управления, силовой
каскад. Независимо от способа управления ЭСУ должны получать однозначную
информацию о состоянии ДПТ как ОР. Эта функция полностью возложена на датчики.
Они являются чувствительными элементами бортовой электроники автомобиля.
Преобразование и обработку информации от датчиков, либо с блока управления,
осуществляет формирующий каскад. На него часто возлагают функции регулирования
параметров сигнала управления, регулирование напряжения питания и
сопротивления цепи якоря, в случае аналоговых систем; регулирование скважности
импульсов, их амплитуды и частоты сигнала управления, в случае цифровых и
микропроцессорных систем. Силовой каскад усиливает сигналы формирующего
каскада и управляет током в цепи якоря. В более сложных системах управления
применяется более широкий
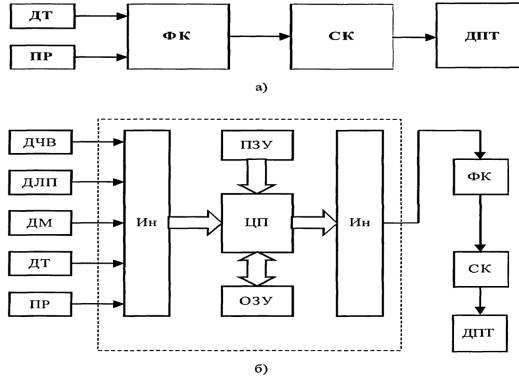
Рис.1. Структурные схемы электронных систем
управления ДПТ с возбуждением от постоянных магнитов : а — аналоговая система
управления ДПТ ; б - микропроцессорная система управления ДПТ.
Анализ систем с импульсным управлением ДПТ позволяет
сделать вывод о возможности управления двигателем в более широком диапазоне
частот вращения. Существуют несколько видов импульсной модуляции управляющего
сигнала, среди которых широтно-импульсная модуляция, частотная модуляция и
амплитудная модуляция. Первый тип модуляции, как правило, исключает второй тип,
но не исключает третьего, применяющегося как коррекция амплитуды. Системы с
частотной модуляцией применяются редко, поскольку в граничных областях частот
наблюдается резкое снижение жесткости механической характеристики. Однако в
случае некоторых режимов работы ДПТ с независимым возбуждением от постоянных
магнитов частотная модуляция управляющего сигнала является необходимой.
Наиболее широко применяемым типом изменения параметров сигнала управления является
широтно-импульсная модуляция [11, 12]. Однако, в случае больших моментов
сопротивления на валу двигателя применение только широтно- импульсной модуляции
невозможно, для поддержания оптимальной частоты вращения ротора ДПТ, необходимо
использовать также амплитудную модуляцию, что позволит расширить диапазон
допустимых моментов сопротивления (примерно на 30%) для двигателей с
неизменными внутренними электрическими параметрами [12].
Анализ механических характеристик
ДПТ с возбуждением от постоянных магнитов позволяет сделать вывод о
возможности устойчивого управления двигателем с сохранением допустимой
жесткости характеристик при частотах управляющего сигнала от 400 Гц до 1300 Гц.
Важным параметром импульсного сигнала управления является скважность импульсов,
которая может изменяться от 0,3 до 0,98, при выходе из режима запуска для
перехода в зону оптимальных частот вращения.
Таким образом, для обеспечения
эффективной работы системы управления ДПТ с возбуждением от постоянных
магнитов в приводах вспомогательного электрооборудования автомобилей
необходимо оптимизировать не только параметры сигнала управления, но и скорость
выхода системы из переходных режимов. Оптимизацию параметров целесообразно
производить совместно с регулированием параметров сигнала управления в блоке
управления и формирующих каскадах. Достижение оптимальных режимов управления
возможно при различных аппаратурных вариантах построения системы управления.
Большую эффективность
регулирования обеспечивают системы управления с адаптивным управлением ДПТ,
которые свободны от указанных недостатков программируемых систем
автоматического управления. В адаптивных системах осуществляется непрерывный
поиск оптимума по заданному параметру. Отличительной особенностью систем
автоматической оптимизации является самоизменяющийся закон регулирования. Это
дает возможность применять системы такого рода для автоматического обеспечения
оптимальных значений интересующих показателей двигателя.