Технические науки / 11. Робототехника
К.т.н. Колдаев В.Д.
Национальный исследовательский университет
МИЭТ, Россия
Эвристические методы контурной
сегментации изображений
Трудности описания процесса обработки
изображений в АПС заключаются в широком разнообразии структур изображений,
подлежащих исследованию, многоцелевом характере их количественной обработки,
меняющемся в зависимости от задачи исследования и предметной области. По мере
развития комплексной автоматизации систем распознания изображений, возникает необходимость
исследования особенностей структуры автоматизированных производственных систем
(АПС) с целью создания универсального набора специализированных агрегатных
модулей и средств управления (рис.1).
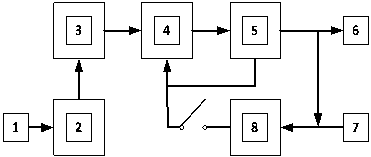
Рис.1.
Схема АПС распознавания изображений: 1 – наблюдаемый объект; 2 – воспринимающее
устройство; 3 – блок обработки проекции; 4 – блок измерения признаков; 5 – блок
принятия решения; 6 – результат распознавания; 7 – правило распознавания; 8 –
обучающее устройство
По выполняемым функциям
системы обработки изображений бывают трех типов [1]: распознающие и измерительные находят применение на операциях контроля качества, классификации и
сортировки как неподвижных, так и движущихся объектов; измерительные системы, кроме определения геометрических параметров
объекта, вычисляют расстояния до объектов, преобразуют координаты, определяют
ориентацию; обзорно-информационные служат
для организации технологического процесса посредством анализа, для обнаружения
преград или необходимых предметов, свободных проходов для транспортных роботов,
организации визуальной обратной связи.
Методы выделения контуров изображений
подразделяются на три группы: пространственного
дифференцирования, функциональной
аппроксимации, высокочастотной фильтрации [2].
Метод
пространственного дифференцирования основан на предположении о том, что граничные точки имеют большую
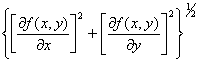
величину модуля градиента функции f(x,y). Алгоритм
пространственного дифференцирования преобразует исходное изображение в
скалярное поле g(x, y)
по правилу:
g(x,y) = ![]() , "xÎX,
, "xÎX, ![]() =
=  .
.
Обработка градиентного изображения осуществляется с помощью порогового
детектора по правилу:
B(x,y) = 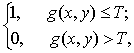 , где T – величина порога фильтрации.
, где T – величина порога фильтрации.
Метод
функциональной аппроксимации позволяет решить задачу выделения границ с помощью оптимизационных
алгоритмов. Для каждой точки изображения (x',у')
рассматривается окрестность R с
центром в этой точке. Для элементов этой окрестности определяется «ступенчатая»
функция:
![]() (x, y, c1, c2, t, a1, a2) =
(x, y, c1, c2, t, a1, a2) = 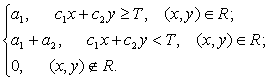 ,
,
Решение задачи сводится в аппроксимации
функции f(x,y),
введенной функцией ![]() (x,y).
Качество аппроксимации оценивается метрикой r(f,
(x,y).
Качество аппроксимации оценивается метрикой r(f,![]() ) в
пространстве функций, интерпретируемых в квадрате:
) в
пространстве функций, интерпретируемых в квадрате:
r(f,![]() ) =
) = ![]() ,
,
где c1, c2, t – параметры, определяющие ориентацию края и
его местоположение; a1,
a2 –
амплитудные характеристики края. Если удачно подобрать параметры
аппроксимирующей функции, обеспечивающие заданное качество аппроксимации (r), то принимается решение о наличии в точке (х', y') края.
Метод
высокочастотной фильтрации
позволяет решить задачу выделения границ с помощью обработки изображения в
области пространственных частот. Этот метод основан на том, что информацию о
границах объектов несут ВЧ составляющие спектра изображения. Пусть F(wx,wy) – спектр
Фурье функции яркости изображения f(x,y); H(wx,wy) –
передаточная характеристика ВЧ фильтра; FR-1(z) – оператор обратного двумерного
преобразования Фурье. Тогда уравнение
g(x, y) = FR-1{F(wx,wy)·H(wx,wy)}
определяет изображение с подчеркнутыми резкими перепадами яркости, т.е.
контурами.
Методы выделения контуров изображений можно также
классифицировать на: параллельные методы, в которых принимается решение о
наличии контура в данной точке изображения на основе результатов анализа
некоторой окрестности этой точки; последовательные методы – методы, в которых
результат обработки точек изображения зависит от предыдущих результатов точек.
Литература
1.
Колдаев В.Д. Имитационное моделирование систем
управления процессом обучения [Текст] / В.Д. Колдаев //
Вестник Северного (Арктического) федерального университета. Серия: гуманитарные
и социальные науки. – 2012. – №4. – С.147-154.
2.
Колдаев В.Д.
Автоматизация процессов контурной сегментации изображений [Текст] / В.Д.
Колдаев // Информационные технологии и инноватика: проблемы, перспективы,
решения: сборник научных трудов / Под ред. Л.Г. Гагариной. – М.: МИЭТ, 2009. –
С.90-96.