Технические
науки/3. Отраслевое машиностроение
К.т.н. Дудников В.С.
Днепропетровский
национальный университет, Украина
Электромеханический регулятор
поворота лопастей на лицензионной ветроустановке USW 56-100
В Украине по конверсионной программе производится лицензионная ВЭУ
USW 56-100. В процессе отработке конструкции и технологии ее изготовления
возникла масса вопросов, связанных с недостатком информации, в частности, по
электромеханическому регулятору лопастей. Нами была проведена работа по
расшифровке основных проектных параметров составных частей регулятора.
Результаты этой работы приведены ниже.
Подробнее кинематическая схема ВЭУ USW 56-100 приведена на рис. 1.
Лопасти 1 ветроколеса в количестве трех штук закреплены на валах 2 с
возможностью вращения в подшипниках 3 относительно ступицы 4 ветроколеса.
Ступица 4 жестко соединена с основным валом 5, который в подшипниках 6
вращается относительно кронштейна 7 основания 8. Вал 5 с помощью фланцевого
соединения 9 присоединен к ведущему валу 10 двухступенчатого мультипликатора
11. С помощью зубчатых колес 12,13,14,15 вращение от вала 5 передается к
выходному валу 16 мультипликатора, преобразуясь (ускоряясь) при этом в 20,8
раза. Вал 16 при помощи телескопической муфты 17, имеющей на концах эластичные
элементы, соединяется с электрическим генератором 18. На валах 2 лопастей
ветроколеса жестко закреплены коромысла 19, которые с помощью шатунов 20,
имеющих на концах сферические шарниры, соединены с конусом 21. Конус 21 жестко
закреплен на валу управления 22. Вал управления 22 на одном конце имеет
наружные шлицы, скользящие по внутренним шлицам соединительной пластины 23,
жестко закрепленной на ступице 4. На втором конце вала 22 нарезана
трапецеидальная наружная резьба 24, с которой зацепляется гайка 25, пристыкованная
к обойме 26. Обойма 26 при помощи двух радиальных шариковых подшипников 27 и
двух упорных подшипников 28 с цилиндрическими роликами установлена в корпусе 29
с возможностью вращения относительного него и соединенная с фланцем 30. Осевая
нагрузка воспринимается подшипниками 28. Корпус 29 винтами соединен с валом 5,
а поэтому вращается совместно с валом 10 мультипликатора. Обойма 28 с помощью
шлицев соединена с валом 31, который на подшипниках 32 установлен в корпусе 33
червячного редуктора. Червячное колесо 34 жестко закреплено на валу 31. Червяк
35 установлен в корпусе 33 на двух подшипниках 36 и с помощью эластичной муфты
37 соединяется с электродвигателем 38, фланец которого также закрепляется на
корпусе 33. Между корпусам мультипликатора 11 и червячным редуктором 33
установлен переходник 39, в котором установлена фрикционная электромагнитная
муфта сцепления, катушка которой 40 закрепляется на переходнике 39, центрируясь
подшипником 41 относительно вала 31, на котором закрепляется диск 42,
находящийся в постоянном фрикционном контакте со вторым диском, состоящем из
двух распираемых пружиной 43 обойм 44 и 45, зафиксированных в окружном
направлении друг относительно друга. Обойма 44 винтами прикрепляется к фланцу
30. В корпусе 46 установлен фрикционный многодисковый электромагнитный тормоз,
катушка которого 47 вместе с наружными дисками 48 и нажимным диском 49
закреплена на корпусе 46, а внутренние диски 50 закреплены на втулке 51,
установленной на валу 31 при помощи направляющей шпонки. Нажимной диск 49 центрируется
относительно вала 31 подшипником 52 и взаимодействует с тремя выступами втулки
53, проходящей через шпоночные пазы втулки 51. Втулка 53 закреплена на валу 31
с возможностью осевого перемещения после надавливания на нее сухаря 54,
поступательно перемещающегося относительно корпуса 55 и закрепленного с
возможностью вращения относительно валика 56, проходящего через вал 31 и жестко
соединенного с валом 22 в зоне резьбы 24. На корпусе 55 закреплены концевые
выключатели 57 и круговой потенциометр 58, взаимодействующие с поступательно
перемещающимся сухарем 54. Корпус мультипликатора 11 тягой 59 со сферическими
шарнирами на концах соединен с основанием 8.
На валу 16 мультипликатора закреплен тахометр 60. Электромагнитная
муфта сцепления выполнена на схеме "нормально открыта", то есть при
отсутствии электрического питания она не соединяет между собой два вала.
Электромагнитный тормоз, наоборот, выполнен по схеме "нормально
закрыт", поэтому в обесточенном состоянии он соединяет вращающиеся
элементы между собой. В исходном, неработающем, состоянии ВЭУ электромагнитная
муфта сцепления, электромагнитный тормоз, электродвигатель 38 и
электрогенератор 18 находятся в обесточенном состоянии. При этом лопасти 1
находятся во флюгерном состоянии (их хорда ориентирована вдоль скорости
набегающего воздушного потока), вал 22 максимально выдвинут из основного вала
5, а сухарь 54 взаимодействует с концевым выключателем 57 (угол поворота
лопастей относительно плоскости вращения ветроколеса равен 82°). Ветроколесо не
вращается совсем или вращается совсем медленно.
При подаче команды на запуск ВЭУ отключается электромагнитный
тормоз (на него подается электрическое напряжение постоянного тока), включается
электродвигатель 38, который через червячный редуктор приводит во вращение вал
31, обойму 26 с гайкой 25. Гайка 25, навинчиваясь на резьбовую часть вала 22,
вызывает его осевое перемещение относительно пластины 23. Перемещающийся вместе
с валом 22 конус 21 воздействует шатунами 20 на коромысло 19 вала 2 лопастей 1,
вызывая их поворот относительно ступицы 4. При повороте лопастей от флюгерного
положении на ВК начинает действовать аэродинамический момент от набегающего
воздушного потока. ВК разгоняется и его вращение через вал 5, зубчатый
мультипликатор 11 передается генератору 18. Частота вращения генератора 18
замеряется тахометром 60. По мере втягивания вала 22 внутрь вала 5 вместе
с ним перемещается поступательно относительно корпуса 55 сухарь 54,
взаимодействующий с потенциометром 58, который выдает 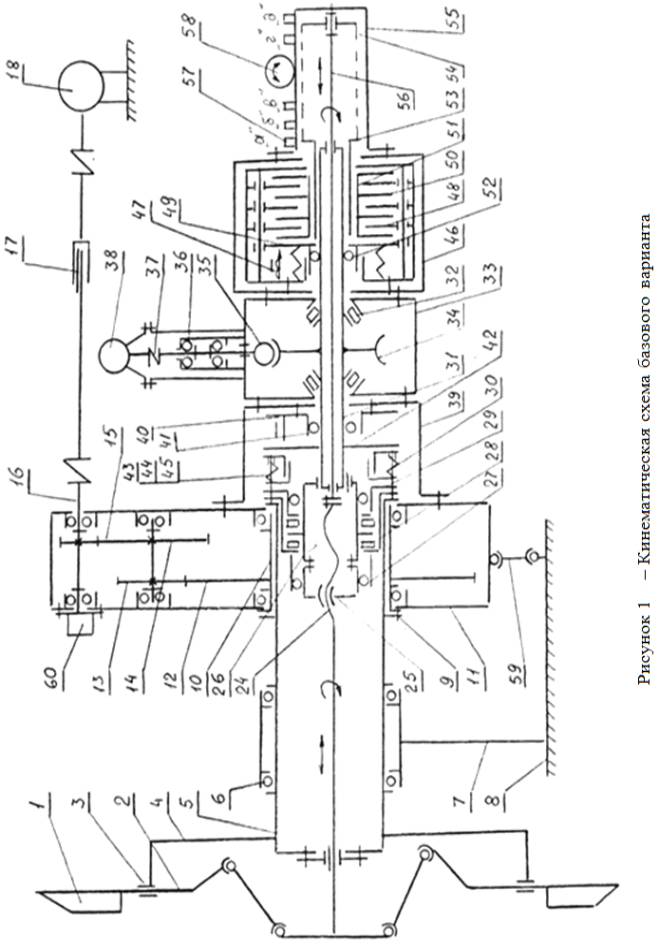
микропроцессору по цепи обратной связи информацию о текущем значении угла
поворота лопастей ВК. Вначале лопасти поворачиваются на угол 35°, после этого
микропроцессор определяет скорость ветра. Если она достаточна, то лопасти
доворачиваются до угла 260 и начинает работать программа
сервоуправления, целью которой является поддержание постоянной выходной
мощности как можно ближе к расчетному значению 107,5 кВт. Когда выходная
мощность находится между установленным верхним (117 кВт) и нижним (97,5 кВт) пределами,
коррекция поворота лопастей не выполняется. При нахождении мощности в рамках
допустимого предела (140 кВт и 80 кВт) микропроцессор усредняет выходную
мощность и выполняет коррекцию угла поворота лопастей каждая 3,2 с. Если
выходная мощность превышает какой-либо из пределов, микропроцессор моментально
выполняет коррекцию угла. Когда выходная мощность превышает верхний допустимый
предел и повторная коррекция угла не возвращает ее в нужные пределы до
получения угла величиной 26°, система отключается по аварийному сигналу
(сильный ветер).
Если расчетная мощность не достигается, когда лопасти ВК полностью
развернуты (φ=00), режим работы будет продолжаться при пониженной мощности
без попыток изменения угла лопастей. При уменьшении ветра и выходной мощности
менее 4 кВт происходит отключение по аварийному сигналу (слабый ветер). Угол
лопастей изменяется постепенно в рамках временного интервала, в течение
которого происходит ускорение ВК при выходе из состояния выработки энергии. Микропроцессор
регулирует степень ускорения и временные интервалы для обеспечения постепенного
ускорения, ограничивая нагрузки на ВК и червячный редуктор. Если внезапный
порыв ветра вызовет резкое ускорение, микропроцессор сократит приращение
последнего шага угла лопасти. Для фиксирования достигнутого угла поворота
лопастей отключается двигатель 38 и включается электромагнитная фрикционная
муфта сцепления, которая своими дисками 42, 44, 45 соединяет между собой обойму
26 с гайкой 25 и основной вал 5 с валом 22, имеющим резьбовой участок 24. Так
как теперь гайка 25 и винт 24 передачи винт-гайка трения скольжения вращаются
совместно в одну и ту же сторону и с одной и той же частотой, то втягивания
вала 22 внутрь вала 5 не происходит, вследствие чего угол поворота лопастей
сохраняется прежним. При этом ВК будет вращаться с частотой 72-73,5 об/мин, а
генератор - с частотой 1527 об/мин, ротор обесточенного двигателя 28 через
несамотормозящийся червячный редуктор вращается с частотой примерно 720 об/мин.
Если частота вращения генератора, а следовательно, и ВК стала меньше указанных
пределов, то необходимо увеличить угол поворота лопастей. Для этого включается
двигатель 38 и отключается муфта сцепления, разъединяющая между собой гайку 25
и винт 24. При вращении двигателя 38 по часовой стрелке с частотой 142,5 об/мин
гайка 25 вращается с частотой 142,5 об/мин в ту же сторону, обгоняя винт 24,
вращающийся с частотой примерно 72 об/мин. Вследствие этого гайка 25 с правой
резьбой наворачивается на винт 24, а вал 22 втягивается внутрь вала 5, изменяя
(увеличивая) угол поворота лопастей ВК. Текущее значение угла фиксируется
микропроцессором по показаниям потенциометра 58. После достижения требуемого
расчетного значения угла микропроцессор подает команду на отключение двигателя
38 и включение муфты, фиксируя достигнутый угол. При превышении частоты
вращения генератора указанных пределов, наоборот, необходимо уменьшить угол
поворота лопастей. Для этого включается двигатель 38 с реверсированием
направления вращения (против часовой стрелки) и отключается муфта сцепления.
Винт 24 вращается по часовой стрелке с частотой приблизительно 72 об/мин, а
гайка вращается против часовой стрелки с частотой 142,5 об/мин. Вследствие
этого гайка 25 свинчивается с винта 24, выталкивая его, в вместе с ним и вал 22
из вала 5, изменяя (уменьшая) угол поворота лопастей ВК. Для отключения ВЭУ
лопасти ВК с помощью двигателя 53 при отключенной электромагнитной муфте
сцепления переводятся во флюгерное положение, о достижении которого указывает
концевой выключатель 57. При прохождении любого из аварийных сигналов ВЭУ
отключается с переводом лопастей ВК во флюгерное положение. После этого
возможен повторный запуск. В случае сбоя питания электрических элементов
привода поворота лопастей ВК, а также аварийной потере управления над электродвигателем
38, микропроцессор снимает питание с электромагнитного тормоза, который
прекращает вращение гайки 25. Вращающийся совместно с ВК винт 24 будет
выкручиваться относительно стационарной в данный момент резьбы гайки 25, быстро
устанавливая лопасти ВК во флюгерное положение. Вместе с винтом 24
поступательно перемещается сухарь 54, приводящий в движение
потенциометр 58, выдающий по цепи обратной связи информацию о текущем
значении угла поворота лопастей. От перемещающегося поступательно сухаря 54 последовательно
срабатывают концевые выключатели 57, сигнализирующие о достижении лопастями ВК
соответствующих углов. В момент достижения угла 92° сухарь 54 надавливает на
втулку 53, которая преодолевает действие пружин тормоза и отжимает нажимной
диск 49, освобождая наружные 48 и внутренние 50 фрикционные диски, и тем самым,
размыкая механический тормоз. После размыкания тормоза освобожденная гайка 25
может под действием силы трения увлекаться вращающимся винтом 24 и вращаться с
ним совместно. Во время этого совместного вращения не будет происходить
изменения угла поворота лопастей. Механическое размыкание тормоза позволяет
исключить механическое повреждение сухаря 54 после упора его в торец втулки 53,
а также ограничить его продольные перемещения и разместить концевые выключатели
в пределах шкалы датчика угла поворота лопастей (потенциометр 58). При угле
φ>920 на лопастях возникает аэродинамический момент, вращающий лопасти
в противоположную сторону (против часовой стрелки). Вследствие этого винт 24
будет вворачиваться в гайку 25, поворачивая лопасти на угол φ<92° до
тех пор, пока ВК полностью не остановится под действием тормозящего
аэродинамического момента.
Конструктивно-компоновочная схема базового варианта привода
механизма поворота лопастей ВЭУ USW 56-100 приведена на рис. 2 (верхняя
половина). Нумерация позиций основных конструктивных элементов соответствует
нумерации на рис. 1.
![]()