Технические
науки/3. Отраслевое машиностроение
К.т.н. Дудников В.С.
Днепропетровский
национальный университет, Украина
Альтернативный вариант
электромеханического регулятора поворота лопастей для лицензионной
ветроустановки USW 56-100
В качестве дальнейшего усовершенствования предлагается новый
альтернативный вариант электромеханического регулятора поворота лопастей ВЭУ
USW 56-100.
Кинематическая схема ветроэлектрической установки USW 56-100 с альтернативным вариантом регулятора поворота лопастей приведена на рис. 1.
Ниже будет рассмотрен принцип действия нового привода и его
взаимодействие с остальной частью ветроустановки при различных режимах
эксплуатации.
Вращающийся вал 1 с помощью разделительной муфты 2, содержащей два
радиально-упорных конических роликовых подшипника 3, поставленных «враспор»,
соединяется со штоком 4, в средней части которого расположен винт 5
шариковинтовой передачи, а на конце выполнена призматическая направляющая 6,
перемещающаяся вдоль корпуса 7. На торце направляющей 6 закреплена тарель 8, на
которой закреплена пружина растяжения 9. Второй конец пружины 9 закреплен на
фланце 10 корпуса 7, фланец 10 болтами закреплен на корпусе 11, который в свою
очередь, через переходник 12, закреплен на корпусе 13 зубчатого
мультипликатора.
В корпусе 11 на двух конических радиально-упорных подшипниках 14
установлено зубчатое колесо 15, внутри которого расположена шариковая гайка 16,
образующая в зацеплении с винтом 5 шариковинтовую передачу, в которой
вращательное движение колеса 15 преобразуется в поступательное перемещение
штока 4. Вращение к колесу 15 передается от двигателя 17 через одноступенчатый
волновой зубчатый редуктор 18, зубчатые колеса 19, 20. 
Волновой редуктор фланцем 21 закрепляется на корпусе 22
промежуточного редуктора, в котором на шариковых радиальных подшипниках 23, 24
установлены валы 25 и 26 колес 9 и 20 соответственно. Корпус 22 соединен с
корпусом 11, имеющим окно для паразитного колеса 20. На валу 25 установлены
электромагнитный тормоз 27 (или электромагнитная фрикционная муфта сцепления) и
фотоэлектрический датчик линейных перемещений, включающий шторку 28
(прерыватель) с системой прорезей, вращающуюся между оптопарой (приемником 29 и
излучателем 30).
Волновой редуктор 18 и двигатель 17 объединены в мотор-редуктор, а
поэтому генератор деформаций закреплен непосредственно на валу двигателя.
Генератор деформаций 31 располагается внутри гибкого колеса 32, соединенного с
выходным валом 33, установленным на двух радиальных подшипниках 34 в корпусе 35
и соединенном с валом 25 и муфтой 36. Гибкое колесо 32 находится в зацеплении с
жестким колесом 37, установленном в корпусе 35.
На корпусе 7 закреплены концевые выключатели 8, срабатывающие при
достижении лопастями ветроколеса соответственно углов 92°,89°, 82°, 0°, -3°
после взаимодействия с направляющей 6.
Привод механизма поворота лопастей ветроколеса работает следующим
образом.
При необходимости изменения угла поворота лопастей ветроколеса
подается электрическое питание на нормально замкнутый тормоз 27 и
электродвигатель 17. Тормоз 27 освобождает вал 25. Двигатель 17 вращает
генератор деформаций 31 волнового редуктора, который создает в гибком колесе 32
бегущую волну деформаций, что при взаимном обкате гибкого 32 и жесткого 37
колес приводит к преобразованию вращательного движения с большим коэффициентом
редукции. Вместе с гибким колесом 32 медленно вращается выходной вал 33,
передающий далее с помощью муфты 36 вращение валу 25. Вращение вала 25 через
зубчатые колеса 19 и 20 передается колесу 15 и шариковой гайке 16. Вращательное
движение гайки 16 с помощью винта 5
|
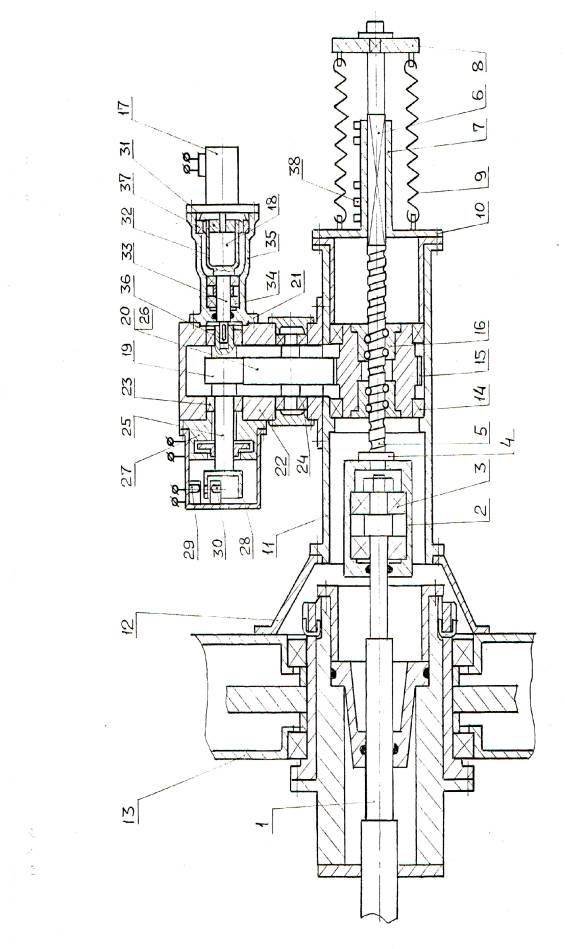
Рис. 2 ― Конструктивная
схема альтернативного варианта |
![]()
шариковинтовой передачи, зафиксированного от вращения с помощью призматической
направляющей 6, преобразуется в поступательное перемещение штока 4, а вместе с
ним через разделительную муфту 2 и
вращающегося вала 1, который, воздействуя на лопасти ветроколеса,
изменяет угол их установки.
Вместе с валом 25 вращается обтюратор 28, который прерывая
световой поток между оптопарой 29, 0, формирует электрические импульсы,
количество которых пропорционально линейным перемещениям штока 4. Между
линейными перемещениями штока 4 и числом оборотов ротора двигателя 17 имеется
жесткая кинематическая взаимосвязь. Фотоэлектрический датчик линейных перемещений
является реверсивным, т.е. он обеспечивает суммирование и вычитание импульсов
двоичным реверсивным счетчиком в зависимости от направления ротора двигателя 17
(направления линейных перемещений штока 4). Для этого он содержит две оптопары,
смещенные одна относительно другой на половину углового шага расположения
прорезей на обтюраторе 28. Информация о текущем значении линейных перемещений
штока 4 (угла поворота лопастей ветроколеса) по цепи обратной связи поступает
на контроллер. который определяет длительность включения двигателя 17.
По достижении лопастями ветроколеса расчетного значения угла
контроллер подает команду на отключение двигателя 7 и включение тормоза 27. Для
включения тормоза необходимо снять с него электрическое питание.
Однако тормоз включается не одновременно с отключением двигателя,
а с некоторой временной задержкой, необходимой для снижения до нуля скорости
вращающегося по инерции ротора электродвигателя. Для определения нулевой
скорости двигателя используется фотоэлектрический датчик линейных перемещений.
Команда на включение тормоза 27 проходит в момент изменения направления
вращения ротора двигателя на противоположное. Тормоз 27 фиксирует вал 25 и всю
остальную кинематическую цепь привода в достигнутом положении лопастей. Усилие,
развиваемое тормозом 27, достаточно для надежного удерживания усилия возвратной
пружины 9 и аэродинамической нагрузки на лопастях ветроколеса.
В зависимости от направления вращения двигателя 17 шток 4
перемещается в ту или иную сторону, тем самым увеличивая или уменьшая угол
поворота лопастей (по отношению к флюгерному положению). По мере перемещения
направляющей 6 совместно со штоком 4 срабатывают концевые выключатели 38, выдающие
информацию о достижении лопастями определенных фиксированных значений углов.
Согласно идеологии базового варианта, это
углы 92°,89°, 82°, 0°, -3°. Подача этих
сигналов осуществляется независимо от показаний фотоэлектрического датчика
линейных перемещений.
При перемещении штока 4 меняется длина пружин растяжения 9. При
угле лопастей φ = -3° усилие
возвратной пружины 9 достигает максимального значения, а при φ = 92°,
наоборот, минимального значения. Параметры пружины 9 подбираются такими, чтобы
гарантировано перевести лопасти ветроколеса во флюгерное положение из любого
промежуточного положения после аварийного отключения питания электродвигателя
17 и кратковременного подключения тормоза 27 к аккумулятору ВЭУ.
Конструктивно-компановочная схема этого варианта привода приведена
на рис. 2. Нумерация позиций соответствует нумерации на рис. 1.