Математика/5. Математическое моделирование
,
Действительный член, профессор Российской Академии
Естествознания (РАЕ), Почетный доктор
наук (РАЕ), Заслуженный работник науки и образования,
к.т.н.,
доц. Буянкин В.М.
Московский Государственный
технический университет имени. Н.Э.
Баумана, Россия
Действительный член, профессор Российской Академии Естествознания
(РАЕ), Заслуженный работник науки и
образования ( РАЕ),
кан.
физ-мат. наук. Ковалева С.К.
РНЦ ” Курчатовский
институт”
Нейропрогнозирование
работоспособности оборудования электропривода с использованием нечетких нейронных сетей
В статье рассмотрены вопросы
нейродиагностики и прогнозирования работоспособности оборудования
электроприводов. Износ оборудования
электроприводов ухудшает статические и динамические характеристики, а иногда
приводит и к аварийным ситуациям. При помощи нейронных сетей удается
своевременно предсказать отклонения
рабочих параметров, сравнить их с аварийными отклонениями и сделать вывод о
работоспособности оборудования
электроприводов.
Введение
Электроприводы используются во многих отраслях производства, таких как станкостроение, машиностроение, в
горнодобывающей и нефтедобывающей промышленности. Электродвигатели работают с
самыми различными нагрузками, в самых различных режимах: длительном,
повторно-кратковременном, кратковременном режимах. В процессе работы
электроприводы со временем изнашиваются, что снижает надежность и
безопасность эксплуатации электрооборудования. Поэтому прогнозирование и
своевременное определение неисправностей
оборудования электроприводов является актуальной задачей. Однако,
прогнозирование неисправностей оборудования электроприводов является довольно
сложной проблемой. Для определения неисправностей электрооборудования
разработано большое количество диагностических
систем, однако, они не позволяют с большой точностью определить весь
спектр неисправностей электроприводов.
Для
повышения качества диагностики предлагаются системы с нечеткими гибридными
нейронными сетями, которые довольно хорошо
зарекомендовали себя при распознавании образов и аппроксимации сложных
нелинейных зависимостей [1,2,3]. Диагностика неисправностей по многим критериям
совпадает с распознаванием образов, и поэтому, используя нейронные сети, можно достичь более высоких
результатов распознавания
неисправностей оборудования электроприводов по сравнению с другими диагностическими системами.
Параметры электроприводов: ток якоря, частота вращения вала
электродвигателя - зависят от многих факторов, таких как моменты инерции
объекта управления, жесткость механических передач, трение в исполнительных
механизмах, которые не всегда возможно точно и четко измерить и предсказать.
Поэтому в данном случае наиболее целесообразно использовать методы, которые
специально ориентированы на построение
моделей, учитывающих неполноту и неточность исходных данных. Именно в такой
ситуации на помощь приходит технология
нечеткого моделирования с использованием гибридных нейронных сетей типа: ANFIS [3]. Использование гибридных нейронных сетей с
нечеткой логикой для системы нейродиагностики позволит более точно и
качественно определять и предсказывать весь спектр аварийных ситуаций.
Цель работы.
Целью
работы является построение нейросетевой системы диагностики с использованием
нечеткой модели гибридной нейронной сети для прогнозирования неисправности
оборудования электроприводов.
Метод решения задачи.
Суть задачи состоит в том, что, зная
динамику изменений параметров электроприводов,
например, изменения тока якоря
электродвигателя за фиксированный интервал времени, можно предсказать значение
тока на определенный момент времени в будущем.
При этом характерной особенностью динамики
изменения параметров электроприводов
являются тенденции колебаний
тока якоря электродвигателя, которые зависят от случайных факторов и которые
сложно точно описать математическими выражениями, что приводит к
невозможности разработки адекватной
модели для анализа этих колебаний [4,5,6]
В качестве
исходных данных возьмем информацию о токе якоря электродвигателя при длительной
работе за некоторый промежуток времени
и занесем ее в таблицу 1
Таблица 1.
Информация о токе якоря электродвигателя
|
|
|
|
|
|
|
|
|
|
|
|
|
13 А |
8 А |
12 А |
7 А |
14 А |
9 А |
12 А |
8 А |
13 А |
7 А |
? |
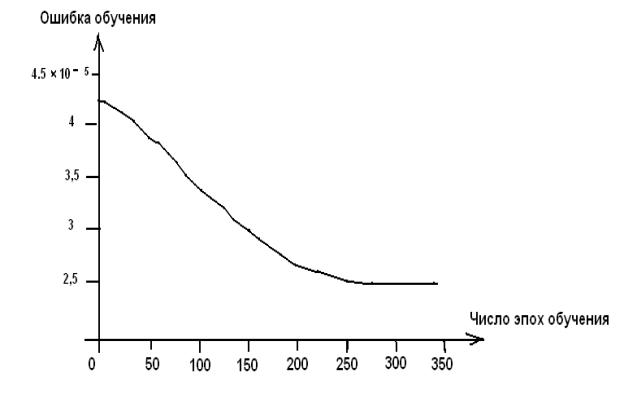
На рис. 1
представлен график изменения тока якоря электродвигателя Iя при длительной работе.
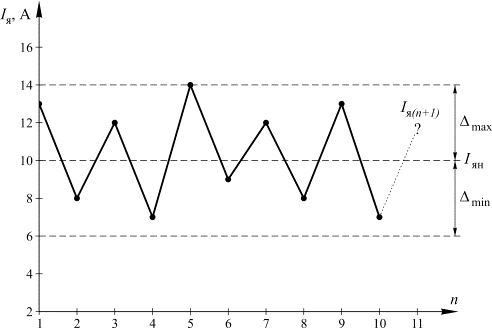
Рис. 1. График изменения тока якоря
электродвигателя Iя при
длительной работе.
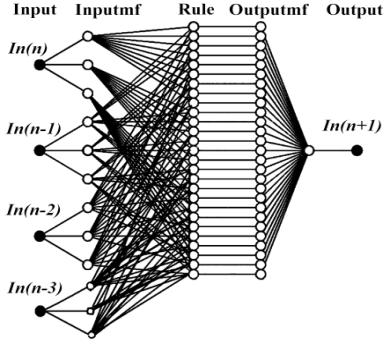
Нечеткая
модель гибридной сети содержит четыре входных переменных. Первая входная переменная (n) является текущей, вторая входная переменная (n-1) предыдущей и.т. я.
до (n-3). Выходная переменная
![]() является целью
обучения.
является целью
обучения.
Обучающие данные сведены в таблицу 2. Объем полученной
обучающей выборки равен шести.
Таблица 2 Обучающие данные
|
|
|
|
|
|
|
13 A |
8 A |
12 A |
7 A |
14 A |
|
8 A |
12 A |
7 A |
14 A |
9 A |
|
12 A |
7 A |
14 A |
9 A |
12 A |
|
7 A |
14 A |
9 A |
12 A |
8 A |
|
14 A |
9 A |
12 A |
8 A |
13 A |
|
9 A |
12 A |
8 A |
13 A |
7 A |