Технические
науки/3. Отраслевое машиностроение
К.т.н. Дудников В.С.,
студент Векилов С.Ш.
Днепропетровский
национальный университет, Украина
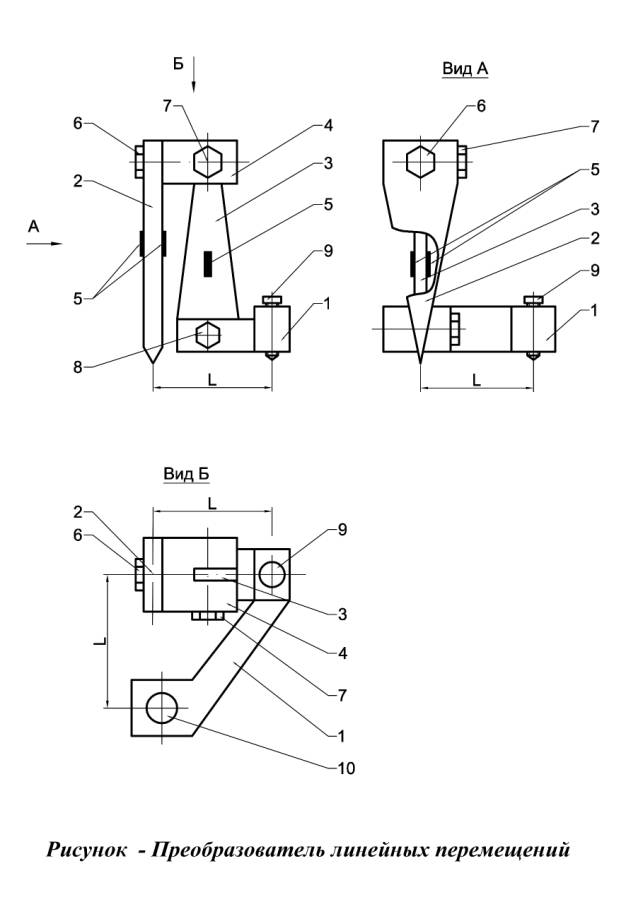
Преобразователь линейных перемещений
Данное
сообщение относится к контрольно-измерительной технике, а именно, к устройству
тензорезисторных преобразователей линейных перемещений и может быть
использовано в различных областях науки и техники, везде где требуется
дистанционное измерение перемещений и деформаций в двух взаимно
перпендикулярных направлениях.
Известен
тензорезисторный преобразователь линейных перемещений, содержащий консольно
закрепленный на корпусе плоский чувствительный элемент в виде балки равного
сопротивления, на который наклеены тензорезисторы, при этом преобразователь
контактирует с объектом исследования только чувствительным элементом [1, с.114,
табл.21, схема 1].
Однако,
данный преобразователь измеряет перемещения только в одном направлении (в
направлении, перпендикулярном плоскости чувствительного элемента). Кроме того,
так как эти перемещения измеряются в системе координат, не связанной с
поверхностью исследуемого объекта, то величина относительной деформации
поверхности объекта в точке не может быть установлена.
Известен преобразователь линейных перемещений,
включающий корпус, в котором консольно закреплены два плоских чувствительных
элемента с наклеенными на них тензорезисторами, например, в виде балочек
равного сопротивления, плоскости которых взаимно перпендикулярны, опирающийся
при этом на поверхность исследуемого объекта в трех точках, располагающихся в
вершинах равностороннего прямоугольного треугольника [1, с.122, рис.56 «б»].
Преобразователь
опирается на исследуемый объект тремя точками, благодаря чему система координат
отсчета оказывается связанной с поверхностью объекта, при этом одна точка
принадлежит корпусу, а две другие чувствительным элементам. Измеряется
перемещение между неподвижной корпусной точкой и подвижными (вместе с точкой
поверхности объекта) концами чувствительных элементов. Так как концы
чувствительных элементов располагаются на разных лучах прямого угла,
образованного пересечением направлений измерения, то полученные результаты
измерения перемещений в двух взаимно перпендикулярных направлениях относятся к
двум совершенно разным точкам поверхности объекта.
Таким
образом, для каждой точки поверхности измеряется только один из двух
компонентов деформированного состояния. Для получения второго компонента (в
перпендикулярном направлении) в точке необходима перестановка и
переориентировка преобразователя на поверхности объекта, а также полностью
идентичное повторение процесса нагружения объекта, что представляет
значительную трудность. Компоненты деформаций в точке оказываются несовместными
по времени, а, следовательно, могут быть и несовместными по значениям, что
вносит ошибку в достоверность экспериментального определения уровня
напряженно-деформированного состояния поверхности исследуемого объекта.
Актуальной становится задача измерения
деформаций для одной точки поверхности в двух взаимно перпендикулярных
направлениях.
Эта задача решается тем, что в преобразователе
линейных перемещений, включающем корпус, в котором консольно закреплены два
плоских чувствительных элемента с наклеенными на них тензорезисторами,
например, в виде балочек равного сопротивления, плоскости которых взаимно
перпендикулярны, опиравшемся при этом на поверхность исследуемого объекта в
трех точках, располагающихся в вершинах равностороннего прямоугольного
треугольника, один чувствительный элемент своим широким концом закреплен в
корпусе, а вторым узким концом с помощью переходника соединен с широким концом второго элемента, который
своим узким концом опирается на поверхность исследуемого объекта в одной из
вершин опорного прямоугольного треугольника, две другие вершины которого
располагаются на корпусе. Кроме того, ось второго чувствительного элемента
расположена в плоскости первого элемента, при этом обе оси располагаются в
плоскости одного из катетов опорного треугольника.
Сущность технического решения поясняется
чертежом.
Преобразователь содержит корпус 1, два плоских
чувствительных элемента 2,3, которые соединены между собой кронштейном 4.
Элементы 2,3 выполнены в виде балочек равного сопротивления. На них
наклеиваются тензорезисторы 5. Элемент 2 консольно закреплен на кронштейне 4 с
помощью болта 6. Концы элемента 3 закреплены в кронштейне 4 и корпусе 1 болтами
7,8 соответственно. В корпусе 1 установлены винты 9,10, с помощью которых
преобразователь опирается на поверхность исследуемого объекта (на чертеже не
показано).
В качестве третьей опорной точки используется
второй (незакрепленный) конец чувствительного элемента 2. Плоскости
чувствительных элементов 2,3 взаимно перпендикулярны, а оси их параллельны. Три
опорные точки преобразователя располагаются в вершине и на лучах прямого угла,
образованного пересечением двух взаимно перпендикулярных направлений измерения
перемещений. При этом ось чувствительного элемента 2, не связанного с корпусом
1, расположена в плоскости чувствительного элемента 3, закрепленного в корпусе
1. Три контактные точки преобразователя при опоре на поверхность исследуемого
объекта образуют систему двух взаимно перпендикулярных координат, связанную с
поверхностью объекта. Расстояние между подвижной точкой на конце
чувствительного элемента 2 до двух неподвижных точек на концах винтов 9,10
равно базовому расстоянию L.
Преобразователь
работает следующим образом. При нагружении объекта его поверхность
деформируется, вследствие чего расстояние между его точками изменяется. Это изменение расстояния и фиксируется преобразователем, опирающемся
на поверхность объекта тремя точками. Подвижная точка, выполненная на конце
чувствительного элемента 2,
перемещается
вместе с точкой поверхности объекта в двух взаимно перпендикулярных
направлениях относительно двух других неподвижных опорных точек
преобразователя. При этом чувствительные элементы 2,3 изгибаются.
Тензорезисторы 5, наклеенные на элементы 2,3 и включенные в измерительную
схему, например мостовую, выдают сигнал, пропорциональный величине и
направлению перемещений подвижной точки преобразователя относительно системы
координат, задаваемой самим преобразователем. Замер величины перемещений точки
в двух взаимно перпендикулярных направлениях на величине базового расстояния L
позволяет судить о величине компонентов деформаций в точке, а, следовательно,
об уровне напряженно-деформированного состояния объекта исследования.
Замер
обоих компонентов деформаций (перемещений на заданной базовой длине) в точке
поверхности производится одновременно во времени, а поэтому их значения
являются совместными и согласованными с процессом нагружения объекта. За счет
применения предлагаемого преобразователя повышается достоверность определения
уровня напряженно-деформированного состояния объекта, при этом в 2 раза
сокращается количество необходимых нагружений объекта.
Литература:
1.
Тензометрия
в машиностроении. Справочное пособие. П/р Макарова Р.А., М.: Машиностроение,
1975. – 288 с.