К.т.н. Неженцев А.Б.
Национальный технический университет
Украины (КПИ), Киев, Украина
Анализ переходных
процессов при
торможении мостовых кранов
Постановка проблемы. Мостовые краны являются
основным средством внутрицехового транспорта. Их механизмы, в соответствии с
нормами безопасности, оснащены автоматическими нормально-замкнутыми тормозами,
которые имеют ряд недостатков: замыкание колодок на тормозном шкиве носит ударный
характер и сопровождается колебаниями тормозного момента; износ накладок в
процессе эксплуатации приводит к увеличению зазоров между накладками и шкивом,
что повышает динамику замыкания колодок; невозможность управления тормозным
моментом в процессе торможения (в том числе при разных по массе грузах);
непостоянство коэффициента торможения, зависящего от состояния и чистоты
трущихся поверхностей, скорости и др.; неодинаковые тормозные моменты
раздельных приводов передвижения, приводящие к перекосам и дополнительным нагрузкам
металлоконструкций кранов и т.д. Все это приводит к резкому торможению кранов,
значительным динамическим нагрузкам (износу элементов
привода и подкрановых путей, трещинам в металлоконструкциях крана),
длительному раскачиванию грузов (увеличению времени рабочего цикла), что
снижает долговечность машин и их производительность.
Для
устранения указанных недостатков большинство крановщиков
«распускают» тормоза механизмов передвижения, а торможение осуществляют
электродвигателями в режиме противовключения. Это приводит к большим потерям
электроэнергии (в три раза превышающим потери при разгоне [1, 2]), повышенному
нагреву двигателей (существенно снижающему их долговечность), а также – к
авариям в случае внезапного отключения электроэнергии.
Снизить
динамические нагрузки и энергопотребление кранов можно путем применения
динамического торможения вместо торможения колодочным тормозом или противовключением.
При этом механические тормоза используются только как
стояночные и аварийные, а торможение крана осуществляется с помощью
электродвигателей, работающих в режиме динамического торможения.
Анализ последних
публикаций.
Работы по исследованию переходных процессов кранов, как правило, посвящены
динамическим нагрузкам, определяемым по упрощенным моделям, которые часто не
учитывают такие важные факторы как упруго-вязкие свойства металлоконструкции
крана, нелинейные механические характеристики привода и др. Несмотря на
повышенный интерес к указанной проблеме и многочисленные публикации, отмеченные
вопросы до сих пор не решены. Отсутствуют убедительные рекомендации по применению
характеристик приводов передвижения кранов в разных тормозных режимах.
В
работах по теории электропривода [1, 2 и др.] как правило, используется упрощенный
подход, основанный на представлении машины в виде одномассовой модели. Поскольку
при этом также не учитываются упруго - вязкие свойства металлоконструкции
крана, колебания груза и др., то такой подход для кранов оправдан только при
грубой оценке потерь энергии. Публикаций по потерям энергии при торможении
кранов практически нет.
Цель работы – определить уровень
динамических нагрузок и потерь энергии мостового крана путем анализа переходных
процессов при его торможении в разных режимах с учетом всех основных факторов
электромеханической системы «электропривод – металлоконструкция – груз».
Для
достижения поставленной цели мостовой кран был представлен в виде трехмассовой
расчетной схемы (см. рис. 1), описываемой системой нелинейных дифференциальных
уравнений [3, 4]
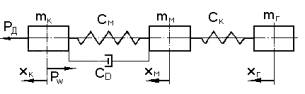
Рис. 1 -
Расчетная схема мостового крана
 (1)
(1)
где ![]() - приведенные к
перемещению колес масса вращающихся частей привода и часть массы моста;
- приведенные к
перемещению колес масса вращающихся частей привода и часть массы моста; ![]() - приведенная к
середине пролета масса средних частей моста и порожней тележки;
- приведенная к
середине пролета масса средних частей моста и порожней тележки; ![]() - масса груза;
- масса груза; ![]() - коэффициент жесткости
металлоконструкции крана в горизонтальной плоскости;
- коэффициент жесткости
металлоконструкции крана в горизонтальной плоскости; ![]() - коэффициент
затухания колебаний металлоконструкции;
- коэффициент
затухания колебаний металлоконструкции; ![]() - горизонтальная
составляющая натяжения канатов при
- горизонтальная
составляющая натяжения канатов при ![]() ;
; ![]() – сила статического
сопротивления передвижению крана;
– сила статического
сопротивления передвижению крана; ![]() ,
, ![]() ,
, ![]() - пути, проходимые
соответствующими массами от начала координат;
- пути, проходимые
соответствующими массами от начала координат; ![]() – приведенная к
ходовым колесам сила привода, которая определялась в зависимости от тормозного
режима работы электродвигателя (противовключение -
– приведенная к
ходовым колесам сила привода, которая определялась в зависимости от тормозного
режима работы электродвигателя (противовключение - ![]() , динамическое торможение –
, динамическое торможение – ![]() ) [4, 5]:
) [4, 5]:
![]() ; (2)
; (2)
![]() , (3)
, (3)
где ![]() ;
; ![]() ;
; ![]() - критический момент
двигателя;
- критический момент
двигателя; ![]() - критическое скольжение на j-ой механической характеристике;
- критическое скольжение на j-ой механической характеристике;
![]() - скорости передвижения крана, соответствующие синхронной и
текущей частотам вращения ротора двигателя;
- скорости передвижения крана, соответствующие синхронной и
текущей частотам вращения ротора двигателя; ![]() - передаточное число привода;
- передаточное число привода; ![]() - радиус ходового колеса;
- радиус ходового колеса;
![]() - к.п.д. механизма.
- к.п.д. механизма.
На рис. 2 приведены механические характеристики
электропривода передвижения мостового крана в тормозных режимах.
а) б)
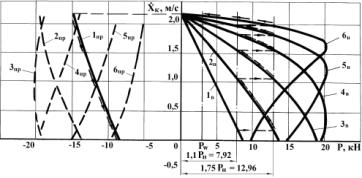
Рис. 2. Механические
характеристики электропривода мостового крана г/п 20 т
в режимах: а – противовключения; б – динамического торможения
Суммарные потери энергии в электродвигателе механизма
передвижения крана при работе в тормозных режимах [6]:
- противовключения
![]()
![]() ; (4)
; (4)
- динамического торможения
![]()
![]() . (5)
. (5)
Интегрирование системы
нелинейных дифференциальных уравнений (1) с уравнениями (2-5) осуществлялось
численным методом с помощью разработанной компьютерной программы [4].
На рис. 3 приведены графики
переходных процессов при торможении мостового крана грузоподъемностью 20т в
режимах противовключения (рис. 3,а) и динамического торможения (рис. 3,б).
а – торможение противовключением по механической
характеристике 3пр
б - динамическое торможение с независимым возбуждением
Рис. 3. Графики
переходных процессов при торможении мостового крана г/п 20 в режимах: а -
противовключения; б - динамического торможения
Анализ результатов
исследований показал, что применение динамического торможения вместо торможения
колодочными тормозами позволяет снизить динамические нагрузки на
металлоконструкцию крана в среднем на 20%, амплитуду раскачивания груза после
остановки крана - в 4 раза. По сравнению с торможением противовключением также
уменьшается энергопотребление крана более чем на 15%. При использовании
оптимальных (по обобщенному критерию, включающего параметры нагружения,
энергопотребления и производительности) механических характеристик в режиме
динамического торможения указанные параметры будут еще лучше.
В отличие от выводов,
основанных на рассмотрении упрощенной модели [1, 2 и др.], потери энергии в
приводе передвижения крана существенно зависят от вида механической
характеристики. Так при торможении мостового крана г/п 20 т в режиме
противовключения потери энергии составили от 452 кДж (торможение по
характеристике 1пр) до 706 кДж (торможение по характеристике 6пр)
т.е. отличаются в 1,6 раза. При динамическом торможении по разным механическим
характеристикам потери энергии изменяется еще больше, поскольку тормозной
момент двигателя зависит не только от величины сопротивлений в цепи ротора, но
и от других факторов (вида возбуждения, величины тока возбуждения, схемы
включения обмоток статора и ротора двигателя и др.). Поэтому отличие между потерями
энергии при противовключении и динамическом торможении может быть как значительно
больше трех раз, так и меньше.
Выводы:- для
повышения точности расчетов динамических нагрузок и потерь энергии при
торможении кранов необходимо использовать математические модели, учитывающие
все основные параметры электромеханической системы «привод – металлоконструкция
- груз»;
- для расчёта динамических нагрузок и
потерь энергии, с достаточной для инженерной практики точностью, можно
приведенную к ходовым колесам тормозную силу электропривода задавать в виде
статических механических характеристик (2, 3). Постоянной ее можно принимать
только при рассмотрении процесса торможения крана колодочными тормозами;
- одним из эффективных
путей снижения динамических нагрузок и энергопотребления кранов является
применение динамического торможения вместо механических тормозов и
противовключения, что снижает динамические нагрузки на 20-25%, амплитуду
раскачивания груза после остановки крана в 3-4 раза, энергопотребление крана
более чем на 15%, а также улучшает условия работы крановщиков и перспективы
автоматизации управления кранами;
- результаты исследований
показывают ошибочность выводов о том, что потери энергии не зависят от вида
механической характеристики. Отличие между потерями энергии, полученными при
торможении мостового крана г/п 20 т по разным механическим характеристикам
составляет в режиме противовключения 1,6 раза, а в режиме динамического торможения
с независимым возбуждением – более чем 2,5 раза.
Литература:
1. Основы
автоматизированного электропривода / Чиликин М.Г. и др. - М.: Энергия. –1974.-
568 с.
2. Ключев В.И. Теория электропривода. –М.:
Энергоатомиздат, 1985.–560с.
3. Будиков Л.Я., Нгуен Н.К., Неженцев А.Б.
Исследование динамики грузоподъемных кранов // Вестник машиностроения, №4. -
М.: Машиностроение, 1981, - с.
39-42.
4. Аветисян С.М., Неженцев А.Б. Программное обеспечение для исследования переходных
процессов грузоподъемных кранов (часть 1: при работе механизмов передвижения) //
Підйомно-транспортна техніка, №4(8). - Днепропетровск, 2003. – с. 33-48.
5. Будиков Л.Я., Неженцев
А.Б., Фоменко Г.П. К вопросу об учете движущей (тормозной) силы асинхронного
электропривода в динамических моделях грузоподъемных кранов // Вісник Східноукраїнського держ. ун-ту, №2(18), серія: Промисловий транспорт.
- Луганск:
Изд-во ВУГУ, 1999. - с. 170-178.
6. Неженцев А.Б. Моделирование потерь энергии при
торможении грузоподъемных кранов // Materialy VII Międzynarodowej
naukowi-praktycznej konferencji «Nauka i inowacja - 2011». Volume 16.
Techniczne nauki: Przemyśl. Nauka i studia, 2011. – str. 68–70.