Технічні науки/12. Автоматизовані системи
керування на виробництві
Матковський П.Ю., Мовчан А.П.
Національний технічний університет
України «КПІ», Україна
Вибір критерію якості
в задачі оптимального параметричного синтезу каскадної системи керування
Каскадні системи автоматичного керування широко розповсюджені в
промисловості. Схема каскадної системи автоматичного регулювання (САР)
зображена на рис.1.

Рисунок 1. Схема каскадної
системи автоматичного регулювання.
На рисунку прийняті
позначення: ![]() ,
, ![]() – сигнали завдання та
збурення;
– сигнали завдання та
збурення; ![]() ,
, ![]() – сигнали розбалансу
коригую чого те стабілізуючого регуляторів;
– сигнали розбалансу
коригую чого те стабілізуючого регуляторів; ![]() ,
, ![]() – передавальні функції
коригую чого та стабілізуючого регуляторів;
– передавальні функції
коригую чого та стабілізуючого регуляторів; ![]() ,
, ![]() – виходи коригую чого
та стабілізуючого регуляторів;
– виходи коригую чого
та стабілізуючого регуляторів; ![]() – управління, що
поступає на об’єкт регулювання;
– управління, що
поступає на об’єкт регулювання; ![]() ,
, ![]() – передавальні функції
випереджувальної та інерційної ланок об’єкта управління;
– передавальні функції
випереджувальної та інерційної ланок об’єкта управління; ![]() – сигнал системи з
проміжної точки;
– сигнал системи з
проміжної точки; ![]() – вихід системи.
– вихід системи.
Існують методики послідовного настроювання регуляторів таких систем [1], коли
розрахунок параметрів регуляторів ведеться як для одноконтурної системи з
еквівалентним об’єктом, проте результат настройки системи часто не задовольняє
поставленим вимогам. Також розроблені номограми [2], за якими можуть бути розраховані
параметри настройок каскадної системи автоматичного регулювання (САР), проте
такий спосіб настройки системи досить складний для програмної реалізації, до
того ж, запропоновані номограми мають обмеження на використання, оскільки розраховані
лише для певних діапазонів параметрів об’єктів. Виникає необхідність створення
методу автоматизації настройки таких систем регулювання. Запропонований метод
може бути використаний для побудови адаптивних каскадних систем регулювання.
Для цих цілей може бути використана мінімізація цільової функції, що
відображує протікання перехідного процесу в системі (задача оптимального
параметричного синтезу, ОПС). Постановка задачі оптимізації:
1) Передавальні
функції об’єкта:
 ,
,  , (1)
, (1)
де ![]() – коефіцієнт передачі;
– коефіцієнт передачі; ![]() – стала часу;
– стала часу; ![]() – транспортне запізнення.
– транспортне запізнення.
2) Передавальні
функції регуляторів:
![]() ,
, ![]() , (2)
, (2)
де ![]() – коефіцієнт передачі;
– коефіцієнт передачі; ![]() – стала часу.
– стала часу.
3) Критерій
оптимізації:
![]() , (3)
, (3)
де ![]() – вектор настройок
регуляторів каскадної системи.
– вектор настройок
регуляторів каскадної системи.
4) Критерій
завершення алгоритму оптимізації:
 , (4)
, (4)
де ![]() – номер ітерації;
– номер ітерації; ![]() – максимальна
кількість ітерацій;
– максимальна
кількість ітерацій; ![]() – задана точність
пошуку відповідної величини.
– задана точність
пошуку відповідної величини.
Алгоритм оптимізації – метод Хука-Дживса [3].
Для рішення задачі оптимізації використано в якості цільової функції квадратичний інтегральний критерій з
акцентуючою функцією [4]:
 , (5)
, (5)
де ![]() – параметр акцентуючої
функції, за допомогою якого можна задавати якість перехідних процесів.
– параметр акцентуючої
функції, за допомогою якого можна задавати якість перехідних процесів.
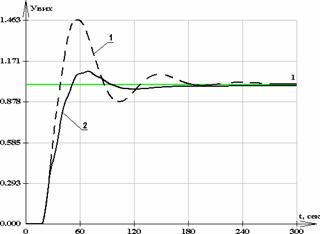
Результат оптимізації показано на
рис. 2:
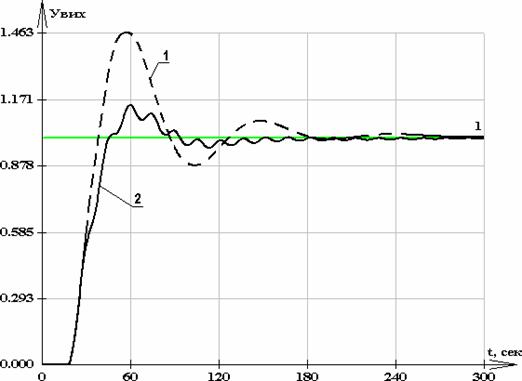
Рисунок 2. Перехідні процеси в каскадній
САР.
1 – до
оптимізації
2 – після
оптимізації
Проте у синтезованій по цьому критерію каскадній САР перехідні процеси
часто мають сильно виражений коливальний характер (на рис. 2 показана
оптимізація об’єкта ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ), тому проведено дослідження, метою якого було
встановити критерій, при використанні якого оптимізація каскадної САР буде
потребувати мінімальну кількість ітерацій, а перехідні процеси не матимуть сильних
коливань. Для цього проведено порівняння результатів оптимізації п’яти критеріїв
якості:
), тому проведено дослідження, метою якого було
встановити критерій, при використанні якого оптимізація каскадної САР буде
потребувати мінімальну кількість ітерацій, а перехідні процеси не матимуть сильних
коливань. Для цього проведено порівняння результатів оптимізації п’яти критеріїв
якості:
 , (6)
, (6)
 , (7)
, (7)
 , (8)
, (8)
 , (9)
, (9)
 , (10)
, (10)
Дослідження критеріїв показало, що можна підібрати такі їх настройки ![]() , що при використанні різних критеріїв для одного і того ж
об’єкта перехідні процеси в синтезованій системі будуть мати однакові показники
якості (в дослідження розглядалися час регулювання та максимальний динамічний
викид), але кількість кроків пошуку буде відрізнятися.
, що при використанні різних критеріїв для одного і того ж
об’єкта перехідні процеси в синтезованій системі будуть мати однакові показники
якості (в дослідження розглядалися час регулювання та максимальний динамічний
викид), але кількість кроків пошуку буде відрізнятися.
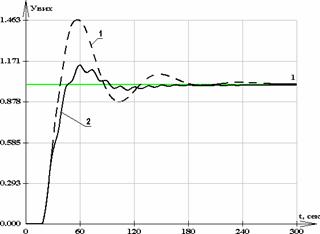
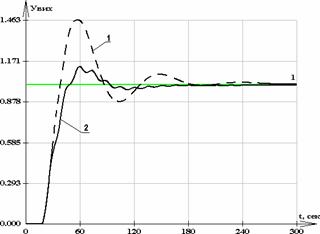
а) критерій (2) б)
критерій (3)
Рисунок 3.
Оптимізація каскадної САР при використанні критеріїв (6, 7).
а) –
критерій (6); б) – критерій (7); 1 – до оптимізації; 2 – після оптимізації.
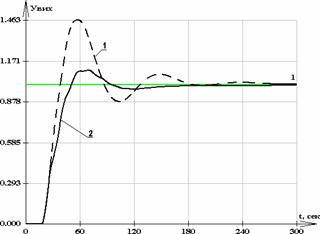
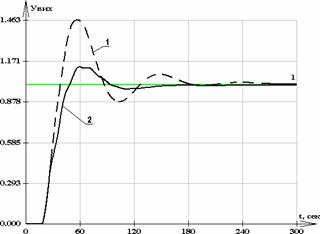
а) критерій (4), 18 кроків б) критерій (5), 13
кроків
в) критерій (6), 22 кроки
Рисунок 4. Оптимізація каскадної САР при
використанні критеріїв (8 – 10).
а) –
критерій (8), 18 кроків; б) – критерій (9), 13 кроків; в) – критерій (10), 22
кроки; 1 – до оптимізації; 2 – після оптимізації.
На рис. 3, 4 представлені перехідні процеси в САР при використанні
критеріїв (6 – 10). При використанні критеріїв (6) та (7) перехідні процеси мають
такий же коливальний характер, як і при використанні критерію (5), а використання
критеріїв (8), (9) та (10) дозволяє синтезувати каскадну САР, перехідні процеси
в якій не матимуть коливального характеру. Це можна пояснити наявністю в
критерії якості сигналу з проміжної точки, який не враховується в критеріях
якості (5 – 7). Серед критеріїв (8 – 10) найкращим є критерій (9), оскільки
його використання дозволяє провести оптимізацію за меншу кількість кроків
оптимізації.
Таким чином, критерій якості в задачі оптимального параметричного синтезу
каскадної системи автоматичного регулювання повинен містити інформацію про
сигнал розбалансу, який поступає на стабілізуючий регулятор. У якості такого критерію
можна запропонувати критерій якості (9).
Література:
1. Ротач
В.Я. Теорія автоматичного управління теплоенергетичними процесами. – М.:
Енергоатоміздат, 1985. – 296 с.
2. Плутес В.С., Лемешкина Ю.А. Исследование
каскадных схем автоматического регулирования и рекомендации к их практическому
применению. Автоматизация химических производств. – М.: НИИТЭХИМ, 1966, вып. 3,
с. 14–18.
3. Химмельблау Д. Прикладное
нелинейное программирование: Пер. с англ. – М.: Мир, 1975, - 536 с.
4. Широков
Л.О. Параметрична оптимізація з ідеальною референтною моделлю// Автоматика. –
1970. – №5.
Матковський П.Ю. __________ Мовчан
А.П. __________