Сарыпбеков М., Сухамбаев А.К., Утешкалиева Л.Ш.
СИЛОВЫЕ РАСЧЕТЫ
ПРИ РУЧНОМ УПРАВЛЕНИИ ИНВАЛИДНОЙ
ШАГАЮЩЕЙ КОЛЯСКИ
Инвалидная
шагающая коляска (рисунок 1) воспринимает вес инвалида Q рамой и распределяет его по ступицам опорных шагающих
колес, один из которых управляется с помощью рычага “OP” руками инвалида. Для того чтобы
уменьшить нагрузку “P” на рычага нужно изменять положение центра масс “ЦМ” относительно двух
опорных ступиц “a” и “ в “.
Вес Q раскладывается на две
составляющие Q1 и Q2, значения от которых зависят плечи ![]() и
и ![]() .
.
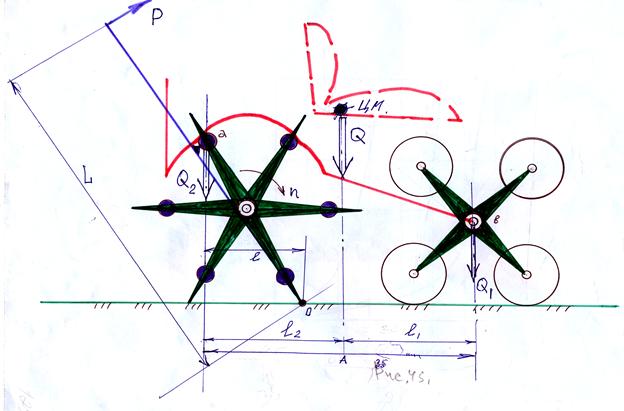
Рисунок 1
Инвалидная шагающая коляска
![]() ,
,
![]()
Оттуда: ![]() ,
,
или: ![]() , (1)
, (1)
тогда: ![]() (2)
(2)
Прежде
всего, нужно задаться значением ![]() из конструктивных
соображение и определять значение
из конструктивных
соображение и определять значение ![]() и
и ![]() из соотношение (2) и (1).
из соотношение (2) и (1).
Далее
нужно определить момент сопротивление созданный силой ![]() относительно точки О при вращение ступицы ОА по ходу часовой
стрелки:
относительно точки О при вращение ступицы ОА по ходу часовой
стрелки:
![]() ,
, ![]() (3)
(3)
При
движении коляски по ровной поверхности опорные колес не создает момент
сопротивления.
![]() .
.
Тогда полный
момент сопротивления:
![]()
![]() (4)
(4)
При подъеме по лестнице
расчеты изменяются, т.к. при подъеме вверх по лестнице рама коляски становится
под углом 260-300 и плеча составляющих сил ![]() и
и![]() , изменяются. Кроме того, крестовина опорных колес
начнет перешагивать полки лестницы. Поэтому составляющая
, изменяются. Кроме того, крестовина опорных колес
начнет перешагивать полки лестницы. Поэтому составляющая ![]() создает начальный
момент сопротивления:
создает начальный
момент сопротивления:
![]() ,
, ![]()
Тогда общий момент сопротивление
растет на величину
![]() .
.
Для
преодоление общего момента сопротивления к ступице прикладывается момент
движущий ![]() , т.е:
, т.е:
![]()
![]()
где: P-усилие
прикладываемое к рычагу (кгс); L-длина рычага управлении (м).
Таким
образом для обеспечения легкость управления движением коляски, необходимо по
возможности уменьшать силу Р.
Уменьшение силы Р возможно двумя
путями, первое -путем увеличение длины рычага L и второе -
путем перемещение сидения, куда приложен вес инвалида Q, так чтобы
составляющая сила Q2 как можно было
меньше по величине. Это зависит от плечи l1,
l2. Для более наглядного анализа работы коляски и
выбора указанных параметров построена круговая диаграмма. (рисунок 2)
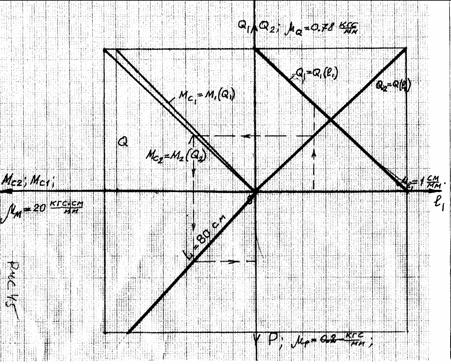
Рисунок 2
Круговая диаграмма
ЛИТЕРАТУРА
1.
Муратов А.М., Кайнарбеков А.К. и др. Шагающие движители: Учебное пособие. Алматы, «Бастау», 2000г. 182 с.
2.
Никулин Павел Иванович Теория криволинейного движения
колесного движителя. - Воронеж: Изд-во Воронеж. ун-та. - 1992. – 211с.