Интеллигентные системы
управления кондиционирования
Петер Липтак 1
Aбстракт
Системы
кондиционирования воздуха,связанные
с оборудованием сооружений и
помещений,потребуют комплексный подход с
точки зрения регуляции,саморегуляции,программирования,логики решения.Необходимо
их понимать,как кибернетическую систему, предназначенную для строительства,
энвироменталистике и окружающей среды. Решение этих систем построено на аппликации эквитермической или двухпозиционной регуляциях. Собственная регуляция может быть
потом решена аналогичными регуляторами в комбинации с цифровыми
кибернетическими системами.В статье приведены
подходы к решению таких систем.
Ключевые слова:
Aппараты
кондиционирования воздуха , управляемое отопление,
эквитермическое регулирование,
двухпозиционное регулирование.
1 Введение
Kлассическим проверенным подходом при управлении кондиционирования воздуха является использование эквитермической или двухпозиционной регуляций .
Эквитермическая регуляция
успешно была использована
в aналогичных
регуляторах управляемого центрального отопления на процессуальном уровне. Цифровая
система регулирования при управлении центрального отопления
на этом уровне имеет имплементованные
алгоритмы классической эквитермической регуляции из области непрерывного управления,
в том числе и
новые подходы k эквитермической
регуляции
на основе знаний (сведений) из области искусственного интеллекта.
Еквитермическая
регуляция используется
в системах конденсации с целью обеспечения требуемой температуры воздуха
в конденсаторных пространствах при разных внешних
условиях. Для этого(обеспечение требуемой температуры) необходимо найти равновесие между доставляемой мощностью и
термической(тепловой) потерей объекта, напр. обеспечить оптимальную
температуру воды отопления при выборе
отопления горячей водой, как
конденсаторной задачей. Нагретая вода, циркулируя в отопительных корпусах,
обеспечивает требуемую
температуру в помещения
отопительного объекта. Так как теплопотеря объекта не является простой измерительной величиной,
необходимо заменить другой величиной. При необходимости управление центрального отопления может быть выгоднее для некоторых объектах теплопотерю заменить
температурой внешнего воздуха. Такое управление процесса отопления называется управлением с
эквитермической регуляцией.
–––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
1 Doc.Ing. Peter Liptak,PhD.,Faculty of special
technology, Alexander Dubcek Univerzity in Trencin, Studentska 1,911 01
Trencin, Slovak republic,tel. 0905 313 059, 0903 655 940, e-mail: liptak@tnuni.sk
2. Управление
кондиционирования воздуха
на основе эквитермической регуляции.
При
обсуждении возможных проектов и направлений (разработок)
автоматизированных и регулированных цепей в конденсаторных системах , будем исходить из основной характеристики автоматизированной цепи с обратной связью, изображённой
на блочной схеме, рис .
2.1[7].
![]() v(t)
v(t)
S R
![]() w(t) e(t) u(t)
y(t)
w(t) e(t) u(t)
y(t)
![]()
![]()
![]()
![]()
![]()
![]() +
+
-
SV
![]()
![]()
Рис . 2.1. Графическая
схема программы автоматизированной цепи , исходные
понятия
где
PČ - сравнительный дифференциальный элемент,
S
– система
,как блок,
регулируемый объект
R
- управляемый блок,
SV - блок обратной связи
и w(t) - входной сигнал,
e(t)
- ошибка
регулирования,
r(t)
- уравнительный сигнал,
y(t)
- выходной сигнал,
v(t) -
возмущение, шум.
Для регуляторного отклонения
действительно:
e(t) = w(t) – y(t) (2.1)
Для
изображения
ретранслянционный функции действительно:
![]() (2.2)
(2.2)
где FR(p), FS(p), FSV(P)
- графические переносы
регистров изображённой цепи.
Возможным примером
аппликации цепи является проект системы для обеспечения
необходимого
положения , несмотря на изменения положения
несущего начального положения. Возможное
решение цепи(привязи)? указано на
рис. 2.2 [8]. Его
реализация означает практическую рабочую систему, рабочее место, состоящее из автоматизированной системы уложенных средств,
согласно видов(сорта)
использования контейнеровым или блочным методами,
методом отбора, подходящего средства реализации мощности , согласно установленной задачи , его
характеристики, автоматизированного рабочего места, выбора
скважины, сенсорной системы,
автоматизированного комплекса измерения
параметров кондиционирования,
электроннического измерения , автоматизированного
комплекса наведения системы до требуемого положения, стабилизации положения системы. Эти названные
автоматизированные действия, из которых состоит
временной ход рабочего места
деятельности оборудования, напр. регулируемой
единицы кондиционирование, имеют условное течение
и зависят от управления компьютерного звена.
Эта способность наблюдать,
направлять и упорядочивать
деятельность обслуживания позволяет
так же имитировать(моделировать) действие для обучающего персонала.
РЕГУЛИРУЮЩИЙ ЭЛЕМЕНТ
RČ P RO S ÚČ
w(t) e(t) u(t) y(t)
![]()
![]()
![]()
![]()
![]()

![]() +
-
+
-
SN
![]()
![]()
Рис . 2.2. Блоковая схема замкнутой регулируемой цепи позиционного механизма
специальной техники
куда RČ -
управляющий элемент, RO -регулирующий
орган,
ÚČ -
центральное звено, S -
обстановка,
P -
привод,
SN - съемник.
Символическое обозначение
наименований регистров -
используемая терминология в
области кондиционерной
технике.
При таком расположении регулируемой
цепи изображение итоговой ретрансляционной функции
указано уравнением:
![]() (2.3 )
(2.3 )
Где FRČ(p), FÚČ(p),
FP(p), FRO(p), FS(p), FSN(p) изображены картины переноса отдельных регистров (см. рис . 2.2.)
Учитывая , что говорится
o pаботе
с большим количеством зависимывых факторов, возможно при анализе и синтезе скорректировать
напр . фузы множество [4]. Если дойдет к изменению параметров регулированной
системы S, необходимо
изменить параметры
регулятора, основного элемента P, RO, или
вместо регулятора использовать фузырегулятора
FR с датчиком скорости.
Эквитермическая
регуляция (ER) является
собственным специфическим случаем буксировочной регуляции..
Для буксировочной регуляции желаемая требуемая величина,
управляемая дополнительной физической
величиной с регулированной системы или сигналом с иной
системы. В случае эквитермической регуляции имеется
требуемое значение – температура воды в
отопительной системе, управляемая температурой
наружного воздуха. Эта зависимость изображена т. наз .
эквитермическими кривыми. [1].
Эквитермическая кривая -
зависимость между температурой воды отопительной системы и наружной
температурой и непрямо?
физически описывает отапливаемое помещение и
отопительную систему.
Эта зависимость непрямая и термическая – изоляционными свойствами
отапливаемого
объекта и
мощностью обогревательной
системы. Проще говоря,
крутизна эквитермической
кривой тем меньше, чем лучше изоляционные свойства
объекта и
чем крупнее (больше) масштаб отопительных телец по отношению к поверхности
внешних стен
объекта [1].
Окончательный эффект ER зависит от безошибочного избрания
эквитермической кривой,
поэтому к практическому применению эквитермических
регулировок имеется k
диспозиции большее
количество эквитермических кривых,
которые характеризуются
своей крутизной
. Пример эквитермических
кривых изображён на рис. 2.3.
Появление кривой с большей крутизной(номером), чем требует
отапливаемый объект,приводит к постоянному перегреванию объекта. Это свойство иногда используется
при так наз. перерегуляции для большого количества пользователей
объекта, причём количество отопления отдельных помещений
пользователи могут регулировать сами(полрегулировка) , например термостатическими
головками на отопительных корпусах [1].
Кроме крутизны кривой , необходимо брать
во внимание, что при эквитермической
регуляции наступает так наз. изменение кривой в вертикальном направлении (а в
некоторых случаях и в горизонтальном направлении). Необходимую
коррекцию напрвления кривой возможно рассчитать в зависимости от того, насколько различается требуемая
температура объекта при низких, средних и высоких
. внешних температурах. Если разница постоянно
одинаковая достаточно кривую
подвинуть. Если разница между запрашиваемой и настоящей
температурой растёт с падающей наружной
температурой, необходимо повысить её
крутизну (константу). Если
наоборот настоящая температура по отношению к требуемой была выше, чем холоднее
была наружная темература (то есть пришло к перегреванию при
охлаждении) , необходимо крутизну
кривой уменьшить [1].
Кроме настройки т. наз . основной эквитермической кривой для требуемой комфортной температуры в
отапливаемом объекте,
возникает и
торможение этой кривой из-за тормозной запрашиваемой
температуры в отапливаемом объекте..
Эти торможения осуществляются
продвижением основной эквитермической кривой до минусовых величин в вертикальном направлении [1].
При современных
цифровых регуляционных системах
увеличивается возможность отопления на разных уровнях и позволяющие выключать его при различных условиях. Дискуссионный график кривых изображен на рис. . 2.3, [1, 13].
Рис . 2.3 пример эквитермических
кривых [1]
Кривые этого типа приводятся в
литературе, касающиейся эквитермической регуляции, и используются в большинстве регуляционных
систем. Переоценка типа эквитермических кривых необходима в основном при высоких наружных
температурах, когда может
возникнуть автоматическое выключение
отопления. С учётом улучшения температурно-технических параметров
отапливаемых домов необходима и низкая крутизна кривых. Пример
преобразования эквитермических
кривых на рис . 2.4 [1, 14].
Рис . 2.4
пример преобразования эквитермических кривых [1]
В связи с
повышением цен на дерево и энергию очень
актуальна оптимальная наладка управления отопительных технологий или систем отопления
теплом (CZT). Во всех случаях необходимо добиваться
максимальную экономию при
использовании теплового источника и современным
акцептованием
требований на температурный комфорт в отдельных
помещениях и зонах объекта .При управлении разных
температурных обстановок(уровней) в так
наз., процессуальном уровне
управления, чаще всего
применяют два типы регуляции:
двухпозиционная и эквитермическая регуляции
[2, 15].
Известно, что основные принципы оптимального комплекса
отопительной технологии создаёт
её максимально рентабильная проектировка и
гидравлическое урегулирование. Другим ценным
источником тепловых сбережений(экономии тепла) является правильное определение температуры отопления,
поскольку уменьшение температуры в отапливаемом месте до 1°C даёт возможность добиться 5 – 6 % уменьшение энергопотребления. Это так
же зависит от
конкретных предложений и требований
пользователя отопительной технологии, корректировки ночных или длительных торможений температур. Полное
выключение отопления домов или частей не экономно, потому
что требует значительного
расхода энергии для достижения той температуры., что была перед
отключением в доме ( в следствии её тепловой ёмкости). Из
приведенных выше данных, представляет
интерес определить оптимальное температурное
торможение, напр . для объектов
отдыха, которые темперованы в
период температурного режима, который
немного выше нуля,и предохраняет от не желательной влажности
интерьер объекта. Температура длительного торможения будет в этом случае зависеть от высоты
внешней температуры и количеством
людей, приезжающих в дома отдыха в
зимнее время. Иным случаям является определение оптимального ночного
температурного торможения в доме, где не живут ,напр
. в административном
здании. Приведённые случаи определения оптимальных
температурных торможений были простыми предположениями, количественно проверены на
примере частично населенного дома с локальным газовым отоплением.
[2].
Двухпозиционная регуляция на практике
используется
из-за своей простота, поскольку регулирующее
приспособление не требует сложного усилителя. Эта
регуляция относится к разряду прерывистой
регуляции, когда регулирующий орган имеет
лишь два положения ![]() ,, или
величина регулирующего воздействия имеет
временную последовательность прямоугольных
импульсов с широкой модуляцией.
[2].
,, или
величина регулирующего воздействия имеет
временную последовательность прямоугольных
импульсов с широкой модуляцией.
[2].
Двухпозиционная регуляция удобна
для регулированых систем, для которых емкостная задержка больше запаздывание, то есть ![]() , или
, или
![]() , где Ts - доминантна временная константная регулированной системы,
Td -
чистое запаздывание, Tu -
период задержки, Tn
- время нарастания. Регулирующее приспособление имеет
релейную характеристику с
гистограмой или же нечувствительность, где
, где Ts - доминантна временная константная регулированной системы,
Td -
чистое запаздывание, Tu -
период задержки, Tn
- время нарастания. Регулирующее приспособление имеет
релейную характеристику с
гистограмой или же нечувствительность, где![]() изменеие регулированной величины
,необходимой для
переключения реле [2].
изменеие регулированной величины
,необходимой для
переключения реле [2].
Недостатком двухпозиционной регуляциии является
то,.что при большей
окружности трубопровода при быстрых колебаниях операционных
величин могут возникнуть
гидравлические перебои, связанные с высоким уровнем шума [2].
Если рассматривать другие
запросы на выработка регулировок, напр . масштаб максимальной и минимальной
теплопроизводительности, экологические запросы
и под., будет выгодна регуляция
неразрывной регулировкой теплопроизводительности , хотя и финансово дороже. Реализация
двухпозиционного регулятора может быть
проста для так наз. нивостатов,
маностатов и термостатов
до программной реализации двухпозиционной регуляции в цифровых
управляемых и сигнализационных систем. [2].
Анализ
качества двухпозиционной регуляции объяснён для регулируемой системы безразмерными
параметрами, где Ks -
усиление регулированной системы и w желаемое
значение регулируемой величины
![]()
![]() (2.4)
(2.4)
Для
регулятора объясним
пропорциональную нечувствительность безразмерным
параметром ![]()
Схема регулированной цепи с
двухпозиционным регулятором см. на рис . 2.5
[2].
Рис . 2.5 Регулированная
цепь с двухпозиционным регулятором.
[2]
Регулируемая система изображена дифференциальным
уравнением с последующим аргументом.
![]() (2.5)
(2.5)
Решением
ввода дифференциального уравнения для операционной величины
u в
форме периодической функции с периодом Т ,получим периодическое часовое течение регулированной величины, для которой определяем
т. наз . указатели двухпозиционной регуляции,
как непрямые функции параметров регулированной
системы ![]() и параметра
регулятора
и параметра
регулятора ![]() [2].
[2].
1. Пропорциональная
амплитуда колебаний:
![]() (2.6)
(2.6)
2. Относительный
сдвиг среднего значения (средних данных) колебаний от заданного
значения w:
 (2.7)
(2.7)
3. Пропорциональная
частота колебаний:
![]() (2.8)
(2.8)
4. Масштаб
периода включение операционной величины и периоды
колебаний :
![]() (2.9)
(2.9)
Из приведённых выше уравнений
следует, что для ![]() действует
действует ![]()
![]() и
и ![]()
Из требования минимальной амплитуды колебаний ![]() ,вытекает так же требование на регулированную систему
,вытекает так же требование на регулированную систему
![]() , которая показывает условия использования
двухпозиционной регуляции.
Масштаб периода включения операционной
величины и периоды
колебаний в практике выбирает
, которая показывает условия использования
двухпозиционной регуляции.
Масштаб периода включения операционной
величины и периоды
колебаний в практике выбирает ![]() Характерные
течения регулировочных процессов при двухпозиционной
регуляции для разных уровней
требуемых значений регулируемой величины можно
увидеть на рис . 2.6
[2].
Характерные
течения регулировочных процессов при двухпозиционной
регуляции для разных уровней
требуемых значений регулируемой величины можно
увидеть на рис . 2.6
[2].
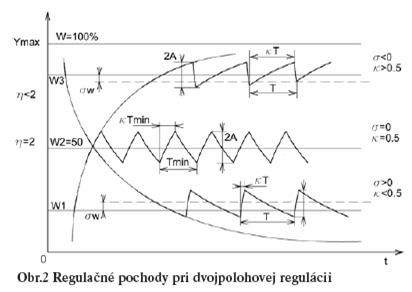
Рис . 2.6
регулировочные процессы при двухпозиционной
регулировки [2]
Управление температурными процессами на базе эквитермической
регуляции
относиться к числу нормальных типов
регуляции, и это на стороне температурных приборов (аппаратов) и
потребителей тепла при
отоплении зданий. На практике, например,KOMEXTERM, реализовала компактные аналогичные регулируемые системы,
как при
цифровой реализации эквитермической регуляции при управлении большего
количества жилых и административных зданий, и ,в частности, при регуляции отопления частных домов.
Принцип ER исходит из практических опытов.
Поводом (доказательством) применения ER при
отапливание помещений была значительная задержка между температурным препятствием помещения,или отапливаемой зоны
здания и изменением температуры в помещение, или комнате отопительной
зоны [2].
Использование обратной связи регуляции
согласно температуре помещения, привело бы при использовании стандартных PID регуляторов k нестабильным регуляторным процессам.
С другой стороны,
компенсация задержек в регулируемой системе, потребовала
бы получение динамической модели
реглированной системы, что усложнило
бы реализацию системы. Эквитермическая регуляция является по сути связанной регуляцией, согласно внешней температуры, в соответствии с
которой наставляется
температура воды в отопительной системе. Классическая эквитермическая регуляция при правильном проекте обеспечивает
равновесие между доставляющей температурным режимом до отапливаемого
помещения, и температурными потерями объекта. [2].
Значительные накопления
тепловой энергия могут быть реализовано при так наз. ночных, выходных или
длительных тормозных температур
в отапливаемых помещениях. Этого можно
достигнуть наставлением т. наз . фиктивной внешней
температуры эквитермической регуляцией,
или перемещением
эквитермической кривой в положительном направлении [2].
Если обозначить истинную наружную температуру ![]() , заданное значение внешней температуры на эквитермирующее регулирующее приспособление, то будет:
, заданное значение внешней температуры на эквитермирующее регулирующее приспособление, то будет:
![]() + (+) заторможение + (+) солнце + (-) ветер + (-) влажность.
+ (+) заторможение + (+) солнце + (-) ветер + (-) влажность.
Сложение указанных
смещенный, т. наз . bias обеспечит поддержку комфортной
температуры в
отапливаемом месте при случайных внешних
влияниях при выполнение
требования экономии
тепловой энергия при отоплении.
Вклучение тепловой ёмкости отапливаемого
объекта достигнется изменением крутизны эквитермических
кривых. В случае сооружений с высокой степенью затепления, напр. с
термическим фасадом ,не будет эквитермическая
регуляция подходящим способом
регулирования температуры отапливаемого здания, и в
этом случае необходимо подумать oб альтернативных
способах регулирования, напр . с компенсацией
тепловых прибылей в отопительной обстановке
[2].
Для анализа длительных температурных
торможений был взят жилой дом , используемый для отдыха, который в
зимним периоде
темерован от 1 до 4 –х раз в месяц только в выходные
дни. Дом отапливался газовым подвесным
котлом LAMBORGHINI MCS – WTOP – TURBO с температурным режимом максимально 23,3 киловатт и
минимально 10,9 киловатт. Отопительная основа среднего
отопления была регулирована
двухпозиционной регуляцией с
использованием цифрового комнатного термостата
LANDI&STAEFA. При экспериментах длительно наблюдалась температура в
помещениях, а так же потребление газа. Для упрощения примера
модели с наружной температурой
Tv = 0°C и прямолинейным ростом темпервтурных потерь,
которые были пропорциональны разнице внутренней температуры
Tvn = 6, 9, 12, 16 °C и наружной температуры
Tv. Экспериментально наблюдался расход газа при темперовании здания ,
в том числе , при отоплении
в воскресное время при
температуре 21°C. В течение месяца наблюдалось
с 0, 1, 2, 3, 4 процессами с температуры
темеперования на температуру
отопления. Расход газа был перерасчитан на финансовые расходы для отопления,
согласно актуальной цене газа в зимний период в 2004 году.
Пример расхода
газа при переходе температурного режима 12
°C на температуру 21°C изображён на рис .
2.7 [2].
Рис . 2.7 расход
топлива при отоплении для длительных
температурных торможений
[2]
На тaб.2.1
и нa рис . 2.8
перечислены расходы на отопление в зависимости от числа
переходов 0, 1, 2, 3, 4. Из приведённых данных видно, что существуют оптимальные
температуры темперования объекта в зависимости от числа
переходов. Экстремальные расходы
на отопление - 1030 Sk/месяц при темперовании
на 6°C без
переходов и 3350 Sk/месяц при длительном отоплении объекта
на 21°C. При З-х переходов(процессов) -
оптимальная температура торможение 9 °C, при
четырех переходах 12°C [2].
Рис
. 2.8 график месячных расходов на отопление
для длительных
температурных торможениях
[2]
Tab. 2. 1 месячные расходы на отопление
при длительных
температурных торможениях
[2]
При понижении
температуры окружающей среды будет расход энергии на отопление
нарастать согласно т. наз . кривые ET (рис . 2.9)
, и тем выше
будут финансовые расходы на отопление.
Характер зависимости расходов от числе переходов(процессов) останется
[2].
Рис . 2. 9 кривая
ET [2]
В
случае административных зданий, потребность длительных торможений противоположна .,
как в случае домов отдыха Торможения
необходимы во время выходных дней и в ночное время, когда выгодным наставлением
температуры ночного торможения можно добиться 20% -ного уменьшения расходов на отопление.
И хотя данный анализ объекта в
частности. 2.3, не является характерным примером
для данных целей, однако может
послужить как модель для поисков оптимальных
ночных торможений.
Рассуждая,что,
тепловые потери объекта относительно
умеренные разнице
внутренней температуры помещения и температуры
окружающей среды , расходы на отопление будут напрямую зависить от расхода газа в отапливаемом объекте
[2].
Существуют три альтернативы:
[2]:
1.
7 x в неделю ночное
торможение на икс °C от 21.00 ч. до5.00 час.
2.
6 x в неделю ночное
торможение на икс °C от 21.00 ч. до 5.00 час..,
в
ввоскрксенье целые сутки,
3. 5 x в
неделю ночное торможение на икс °C от 21.00 ч. до 5.00 час..,
в
воскресенье и субботу круглые(целые) сутки.
Итоги анализа для температур торможения
6, 9, 12, 16 приведены в таб. 2.2.Из этих
данных следует , что при
температуре окружающей среды 0 °C в указанных трёх альтернативах оптимальная температура ночного торможениея12
°C. Расход
газа для каждого ночного
торможения приведён на
рис . 2.10 [2].
Рис . 2.10 расход
топлива для отопления при ночных
температурных торможениях
[2]
Tab. 2. 2
пример расхода
топлива для отопления при ночных
температурных торможениях [2]
Необходимо заметить, что при отоплении больших жилых корпусов,административных зданий, когда, как правило используется эквитермическая
регуляция, кроме
регулирумого торможения согласно требований потребителя,имеют и другие
возможности уменьшения энергетических потребностей зданий. Это,напр
включение метеорологических условий
(ветер, солнце, влажность) путём систематической
настройки эквитермической регуляции [2].
Эту
настройку может выполнять опытный оператор
введением фиктивных величин температур окружающей среды в зависимости от указанных выше
факторов или, автоматическим применением подходящих (определённых)сенсоров, и перемещением или наклоном эквитермических
кривых
[3]. Дальнейшей возможностью могут быть внутренние температурные прибыли,
напр . занятость помещения. В
экономии при управляемом
отоплении административных зданий
, так же имеет большое значение
квалифицированный обслуживающий персонал.
3. Дискуссия
достигнутых
результатов
При аппликации ER отопления необходимо
наставить пригодную
эквитермическую кривую.
Если кривая неправильно установлена,
может быть качество процесса отопления снижено в виде
высокой
или низкой температуры в отопительных системах , или
высоким расходом тепла и под. Поэтому важно
следить(быть внимательным) к
алгоритмам управления отопления на процессуальном и диспетчерском уровне
управления, которые позволяют автоматически
изменять параметры эквитермической кривой.
Во 2 –ой части описаны два самых распространенных метода регулирования отопительных процессов –
двухпозиционная и эквитермическая
регуляции. Приведены основные теоретические принципы ,а также преимущества и недостатки указанных
способов регуляциии. Далее указывается поступ для оптимилизации
ночных воскресных и длительных температурных торможений при отоплении,
которые имеют большое значение при снижении энергетических претензий отопления и последующую
финансовую экономию.
4 Заключение
Новые алгоритмы
управления отопления
на базе искусственного интеллекта в сочетании с выгодами эквитермической
регуляции , как основной регуляциии
температуры отопительной воды,
могут привести к улучшению процессов отопления преимущественно в современных и диспетчерских системах, которые своим
техническим и программным обеспечением поддерживают создание аппликаций ,и , в том
числе ,на базе искусственного интеллекта. Во
время работы были решены способы регуляции
теплопроизводительности, пригодные для применения эквитермической регуляции изменением
температуры котельной вода и
регуляцией смешения.
Итоги, которые были получены экспериментально (kap. 2) на реальном объекте отопления газом,
количественно подтвердили предположения, что в зависимости
от конкурентных
условий отопления , возможно оптимилизовать данные ночных
или длительных
температурных торможений, при которых можно достигнуть
минимальные финансовые расходы.
Несмотря на то, что итоги были получены определённым упрощением предположений (на одной внешней температуре),
подтвердились и недостатки выключения отопления или наставление сверхнизких
температур торможения
отопления объекта
или его частей, с точки зреня современности, очень
актуального вопроса снижения
финансовых расходов на отопление
зданий.
Литература
[1] PITEĽ, J.: Riadenie vykurovania na báze
ekvitermickej regulácie. /online citované 3.3.2008 / http://www.atpjournal.sk/casopisy/atp_04/pdf/atp-2004-03-39_41.pdf
[2] KACHŇÁK,
A. – RÁC, R. – DIENOVÁ.: Optimalizácia
teplotných útlmov pri vykurovaní
budov. / online citované 5.
3. 2008 /http://www.atpjournal.sk/casopisy/atp_05/pdf/atp-2005-03-86.pdf
[3] KACHŇÁK,
A. – HOLIŠ, M.: Aplikácia hybridného neuro-fuzzy
systému pre optimalizáciu
kontinuálneho procesu. In: Automatizace, 7, 2002, s. 400-408.
[4] Lipták, P.,
Kopecký, I., Galeta, A.: Špeciálna technika, časť:
Stroje a zariadenia. Trenčianska univerzita Alexandra Dubčeka
v Trenčíne, Trenčín 2005. ISBN 80-8075-053-X.
[5] Lipták,
P., Kopecký, I., Galeta, A.: Prevádzková
spoľahlivosť z pohľadu vplyvu prostredia.
In.:Sborník Univerzity obrany
v Brne, Řada B - Technické a přírodní
vědy 1, Brno 2004, ISSN 1211-1023
[6] Kružliak,
J.: Prevádzková spoľahlivosť, diagnostika
a údržba ženijných strojov. Vojenská
akadémia Liptovský Mikuláš, 2002.
[7] Balátě, J.:
Automatické řízení. BEN Praha, 2004. ISBN
80-7300-148-9.
[8] Boršč, M.,
Hurta, F., Vitko, A.: Systémy automatického riadenia.
Trenčianska univerzita v Trenčíne,
2001. ISBN 80-88914-48-5.
[9] Technický
popis a návod na obsluhu, ošetrovanie
a údržbu diaľkového detektora TCHL DD-CWA.
Vojenský technický ústav Liptovský
Mikuláš.
[10] Lipták, P.,
Gogora, M., Galeta, A: Probable trends in development of light Armored Vehicles
4x4. In : Zborník 7. Symposium on Weapon Systems, Brno 2005. ISBN
80-7231-007-0.
[11] Lipták, P.,
Kopecký, I., Hládek, M.: Next Trends in light Armored Vehicles
Modifications. . In: Zborník 7.
Symposium on Weapon Systems, Brno 2005. ISBN 80-7231-007-0.
[12] Számtó, L.:
Maxwellovy rovnice a jejich názorné odvození. BEN
Praha, 2003. ISBN 80-7300-096-2.
[13] Bajla.,
J., Lahučký, D.: Strojárske tabuľky. SÚTN
Bratislava, 2004. ISBN 80-88971-18-7.
[14] Lahučký,
D., Kacko, P.: Základy inžinierstva. TnU AD
v Trenčíne, 2006. ISBN 80-8075-148-X.
[15] Maga,
D., Halgoš, J., Lahučký, D.: Finite Element Based Analysis of
Speciál Mechatronic Actuator. Mechanics 4/2006, Journal of Theoretical
and Applied, Sofia 2006. Str. 3-16. ISSN 0861-6663.
Оппонент: Doc. Ing. Oto Barborák,
CSc., Doc. Ing. Milan Jozefek, CSc., Trenčianska univerzita Alexandra
Dubčeka v Trenčíne,
Plk. Ing. Dušan Gavlas ,
náčelník Odboru logistiky Veliteľstvo síl
výcviku a podpory v Trenčíne