Магистрант Кабдрахманова
М.Е, к.т.н. Кабылбекова У.М.
Казахский
Агротехнический Университет им.С. Сейфуллина
Применение
преобразования для полосовых фильтров
Свойства Z-преобразования. Важным свойством z-преобразования является
свойство его единственности. Любая последовательность s(k)
однозначно определяется z-изображением в области
его сходимости, и наоборот, однозначно восстанавливается по z-изображению.
Без углубления в теорию, можно констатировать,
что все свойства ДПФ действительны и для z-преобразования.
Отметим некоторые из них.
Линейность: Если s(k)=a*x(k)+b*y(k),
то S=aX(z)+bY(z).
Соответственно z-изображение допустимо
только для анализа линейных систем и сигналов, удовлетворяющих принципу
суперпозиции.
Задержка на n тактов:
y(k)=x(k-n).
Y(z)
= ![]() k =
k = ![]() k = z n
k = z n ![]() k-n=
k-n=
=
z n ![]() m= z n X(z)
m= z n X(z)
Соответственно, умножение z-образа
сигнала на множитель z n
вызывает сдвиг сигнала на n тактов дискретизации.
Рассмотрим на примере эквивалентной схемы
фильтра.
Примеры аппроксимации кривых и разностные
уравнения.
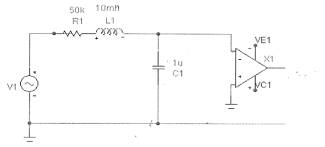
Рис.1 - Электрическая цепь R, L, C,
питаемая синусоидальным напряжением U=UmSin(wt)
Построим
дифференциальное уравнение,
описывающее процессы в приведенной цепи
фильтра.
![]() (1)
(1)
или
![]() (2)
(2)
Заменив ![]() на
на ![]() и
и ![]() на
на ![]() , запишем
дифференциальное уравнение
, запишем
дифференциальное уравнение
в виде:
![]() (3)
(3)
где ![]() и
и
![]() - первая
и вторая производные по времени.
- первая
и вторая производные по времени.
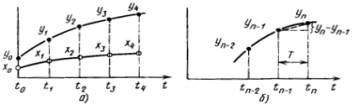
Рис. 2 – Графическое
представление принципа z-преобразования
При интегрировании
такого уравнение с помощью цифровой ЭВМ переменные ![]() и
и ![]() и
производные
и
производные ![]() должны представляться
для дискретных моментов времени и в цифровой форме. На рис. 2а показаны дискретные
моменты времени
должны представляться
для дискретных моментов времени и в цифровой форме. На рис. 2а показаны дискретные
моменты времени ![]() и соответствующие этим моментам времени
значения переменных
и соответствующие этим моментам времени
значения переменных ![]() и
и ![]() , которые с помощью
АЦП могут быть преобразованы в
цифровую форму, производные
, которые с помощью
АЦП могут быть преобразованы в
цифровую форму, производные ![]() представлены через значения
представлены через значения ![]() для моментов
для моментов ![]() (рис. 2б) можно приближенно выразить
производную
(рис. 2б) можно приближенно выразить
производную ![]() для момента
для момента ![]()
![]()
![]() (
(![]()
![]()
и через значения ![]() производную
производную ![]() :
:
![]()
Аналогично вторую производную можно представить
выражением
![]()
После подстановки
выражений ![]() имеем
имеем
![]()
Полученные приближенные выражения ![]() подставим в дифференциальное уравнение (1):
подставим в дифференциальное уравнение (1):
![]()
Разрешим полученное выражение относительно ![]()

или
![]() (4)
(4)
где ![]() -значения коэффицентов в (3) перед соответствущими переменными.
-значения коэффицентов в (3) перед соответствущими переменными.
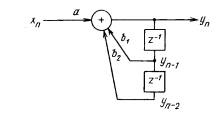
Рис.3 – Схема последовательности вычислений
Последовательность вычислений
для подобных фильтров
удобно представлять в виде схемы, показанной на рис.3.
Здесь над цепями, подходящими к суммирующему элементу, показаны
коэффициенты, с которыми производится суммирование соответствующих переменных; элемент задержки на один тактовый интервал
времени Легко обнаружить соответствие между данной схемой и решением разностного уравнения.