Технические науки/
10.Горное дело
К.т.н. Чигур Л.Я.
Івано-Франківський
національний технічний універитет нафти і газу, Україна, 76019, м.
Івано-Франківськ, вул. Карпатська,
15. E-mail: lyudmylla@gmail.com
Контроль технічного стану алмазних
доліт за умов апріорної та поточної невизначеності процесу буріння
На сьогоднішній день
нафтова промисловість є стратегічною для багатьох країн і України зокрема. Не
дивлячись на досить великі потенційні можливості видобутку нафти, дана
промисловість в Україні характеризується низькими показниками, в порівнянні з
країнами, які володіють приблизно таким об’ємом ресурсів. У зв’язку з
енергетичною кризою були вичерпані значна частина середніх і великих родовищ, а
скорочення асигнувань на геологорозвідувальні роботи привело до ситуації, коли
приріст розвіданих запасів вуглеводнів не перевищує їхній видобуток. Тому
актуальною є задача зменшення собівартості буріння за рахунок різних факторів.
Значною мірою вирішити всі ці питання може оптимальний вибір долота при бурінні
свердловини. На сучасному етапі розвитку нафтогазової промисловості свою
доцільність використання довели алмазні долота різних типів. Не зважаючи на
високу вартість, в порівнянні з шарошковими долотами вони мають ряд значних
переваг. Застосування доліт типу алмазних доліт дозволяє в порівнянні з
шарошковими збільшити проходку долота і швидкість буріння в 4-5 раз, зменшити
кількість спуско-підіймальних операцій, покращити контроль за напрямком
буріння, значно зменшити вібраційне навантаження на бурильний інструмент,
заощадити до 40÷50% палива, а також експлуатаційних витрат; забезпечити
повторне використання долота без погіршення експлуатаційних якостей і
мінімальний ризик обриву інструмента за рахунок відсутності рухомих елементів,
значно знизити собівартість метра проходки і часу буріння свердловини [1].
Для вирішення
поставленої задачі пропонується застосувати сомоорганізовану нейронну мережу
Кохонена (СОМ), яка дозволяє самостійно ідентифікувати нестаціонарності контрольованого
процесу, шляхом аналізу вхідних даних в реальному масштабі часу.
Аналіз
роботи мереж такого типу, дозволив зробити висновок, що для вирішення
поставленої задачі оптимальною є мережа Кохонена, що складається з М нейронів, які утворюють прямокутні
решітки на площині. Як активаційна функція мережі пропонується функція Гауса, яка забезпечує високу
швидкість навчання СОМ при мінімальній
похибці квантування [4].
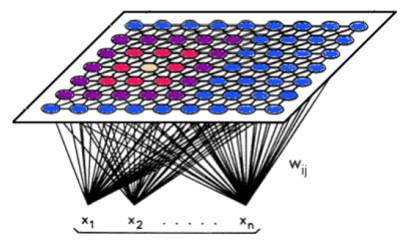 Модель
Кохонена відноситься до класу алгоритмів векторного кодування. Вона забезпечує топологічне
відображення, що оптимально розміщає фіксоване число векторів у вхідному
просторі більш високої розмірності, забезпечуючи, таким чином, стиснення даних
(рис.1).
На цьому рисунку прийняті такі позначення:
Модель
Кохонена відноситься до класу алгоритмів векторного кодування. Вона забезпечує топологічне
відображення, що оптимально розміщає фіксоване число векторів у вхідному
просторі більш високої розмірності, забезпечуючи, таким чином, стиснення даних
(рис.1).
На цьому рисунку прийняті такі позначення: ![]() - вектор вхідних
даних,
- вектор вхідних
даних, ![]() - синаптичні зв’язки
між нейронами.
- синаптичні зв’язки
між нейронами.
 Застосування
мережі Кохонена дозволяє крім іншого виявляти нові стани в яких перебуває
контрольо-ваний об’єкт, які раніше не були описані статистичними вибірками.
Система зможе розширювати власну базу знань про можливі стани контрольованого
об’єкту у процесі функціонування.
Застосування
мережі Кохонена дозволяє крім іншого виявляти нові стани в яких перебуває
контрольо-ваний об’єкт, які раніше не були описані статистичними вибірками.
Система зможе розширювати власну базу знань про можливі стани контрольованого
об’єкту у процесі функціонування. Дискретні значення
контрольованих технологічних параметрів (момент на долоті, частота його
обертання, навантаження на долото, швидкість проходки) подаються на вхід мережі.
Ці дані представляють собою набір із m
точок ![]() в n-вимірному
просторі. Необхідно розбити цю множину точок
в n-вимірному
просторі. Необхідно розбити цю множину точок ![]() на k - класів близьких стосовно квадрату
евклідової відстані. Для цього необхідно знайти k точок
на k - класів близьких стосовно квадрату
евклідової відстані. Для цього необхідно знайти k точок ![]() таких, що
таких, що  , мінімальне
, мінімальне ![]() . Існує декілька
алгоритмів вирішення цієї задачі.
. Існує декілька
алгоритмів вирішення цієї задачі.
Нейромережа оцінки зношення
долота на вибої свердловини є складовою частиною загальної системи контролю зношення
долота в умовах невизначеності процесу буріння свердловин.
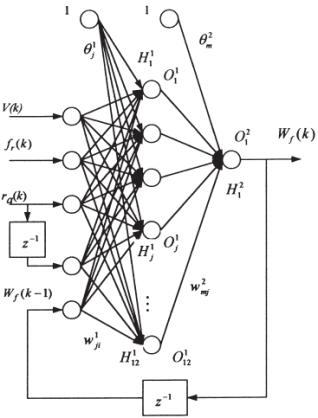 Приховані шари забезпечують проміжне оброблення вхідного сигналу.
Приховані шари забезпечують проміжне оброблення вхідного сигналу.  Пред’явлення мережі вхідних
параметрів процесу буріння здійснюється у певних проміжках часу – кроках
Пред’явлення мережі вхідних
параметрів процесу буріння здійснюється у певних проміжках часу – кроках ![]() , вважатимемо, що на цих проміжках значення вимірюваного
параметру залишаються незмінними. Вхідними сигналами нейромережі є: механічна
швидкість буріння
, вважатимемо, що на цих проміжках значення вимірюваного
параметру залишаються незмінними. Вхідними сигналами нейромережі є: механічна
швидкість буріння ![]() , частота обертання породоруйнівного інструменту
, частота обертання породоруйнівного інструменту ![]() , момент на породоруйнівному інструменті
, момент на породоруйнівному інструменті ![]() . Два інших входи
. Два інших входи ![]() і
і ![]() можуть бути визначені
з попередніх значень моменту на породоруйнівному інструменті
можуть бути визначені
з попередніх значень моменту на породоруйнівному інструменті ![]() та оцінки зношення
породоруйнівного інструменту
та оцінки зношення
породоруйнівного інструменту ![]() . Введемо наступні
позначення для сигналів кожного з прошарків нейронної мережі:
. Введемо наступні
позначення для сигналів кожного з прошарків нейронної мережі: ![]() - входи
нейромережі:
- входи
нейромережі: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ;
; ![]() - виходи прихованого
прошарку нейромережі;
- виходи прихованого
прошарку нейромережі; ![]() - вихід нейромережі:
- вихід нейромережі: ![]() .
.
Вагові коефіцієнти між вхідним і прихованим прошарками
позначимо через ![]() , а вагові коефіцієнти між прихованим і вихідним прошарками
як
, а вагові коефіцієнти між прихованим і вихідним прошарками
як ![]() . В запропонованій архітектурі нейромережі, що зображена на
рис. 1, введено два додаткові вузли, одиничні виходи яких зв’язані з нейронами в
прихованому і вихідному прошарках. Ці
додаткові зв’язки призначені для корекції порогових активаційних функцій, що
входять до алгоритму функціонування мережі. Вагові коефіцієнти зв’язків між
додатковими вузлами і прихованим прошарком складають
. В запропонованій архітектурі нейромережі, що зображена на
рис. 1, введено два додаткові вузли, одиничні виходи яких зв’язані з нейронами в
прихованому і вихідному прошарках. Ці
додаткові зв’язки призначені для корекції порогових активаційних функцій, що
входять до алгоритму функціонування мережі. Вагові коефіцієнти зв’язків між
додатковими вузлами і прихованим прошарком складають ![]() , а між додатковими вузлами і вихідним прошарком -
, а між додатковими вузлами і вихідним прошарком - ![]() відповідно.
відповідно.
Процес створення нейромережевого алгоритму оцінки
зношення породоруйнівного інструменту починається з ініціалізації нейромережі,
тобто попереднього визначення всіх вагових коефіцієнтів ![]() ,
, ![]() ,
, ![]() ,
, ![]() . На цьому етапі їм присвоюють випадкові малі значення.
. На цьому етапі їм присвоюють випадкові малі значення.
Процес навчання
починається з того, що нейромережі пред’являються ![]() зразків
зразків ![]()
![]() набору вхідних
технологічних параметрів процесу буріння
набору вхідних
технологічних параметрів процесу буріння ![]() та бажаний вихід
та бажаний вихід ![]() , який характеризує ступінь зношення породоруйнівного
інструменту. Зразки, що використовуються для навчання були отримані шляхом
обробки інформації отриманої шляхом запису основних технологічних параметрів на
бурових платформах України та Росії. Ступінь зношення породоруйнівного
інструменту, що використовується в навчальних зразках -
, який характеризує ступінь зношення породоруйнівного
інструменту. Зразки, що використовуються для навчання були отримані шляхом
обробки інформації отриманої шляхом запису основних технологічних параметрів на
бурових платформах України та Росії. Ступінь зношення породоруйнівного
інструменту, що використовується в навчальних зразках - ![]() змінюється в межах
[0,1] і визначається в результаті обробки експертної інформації
технологів-операторів (лінгвістичні оцінки ступеня зношення породоруйнівного
інструменту для кожного набору контрольованих технологічних параметрів) з
використанням методів Fuzzy Logic.
змінюється в межах
[0,1] і визначається в результаті обробки експертної інформації
технологів-операторів (лінгвістичні оцінки ступеня зношення породоруйнівного
інструменту для кожного набору контрольованих технологічних параметрів) з
використанням методів Fuzzy Logic.
Вихід нейромережі
обчислюється згідно принципів класичних Feed-Forward мереж.
Реалізація запропонованих підходів мереж
дозволить розробляти адаптивні системи контролю зношення долота і ідентифікації
технологічних ситуацій, що виникають в процесі буріння глибоких свердловин на
нафту і газ. Ці системи дозволять значно підвищити вірогідність контрою,
оскільки можуть автоматично пристосовуватися до змінних геолого-технічних умов
процесу поглиблення свердловин, та прогнозувати виникнення і розпізнавати
відомі передаварійні ситуації і ускладнення, які можуть виникнути в процесі
буріння свердловин.
Література
1.
Бондаренко Н. А. Исследование износа алмазных
буровых долот. 5. Кинетика износа/ Н. А. Бондаренко, А. Н. Жуковский,
В. А. Мечник// Розвідка та розробка
нафтових і газових родовищ. – 2007. – №1(22). – С.34 - 37.
2.
Шагеев А. Ф.
Автоматизированный мониторинг процессов обработки скважин – первая ступень
интеллектуальных систем управления/ А. Ф. Шагеев, А. М. Тимушева,
Л. Н. Шагаева, А. С. Гришин// Нефтяное хозяйство – 2000.
– №11. – С. 48-49.
3.
Штучні нейромережі.
Навчальний посібник/ Руденко О. Г., Бодянський Є. В. –
Харків, 2006. – 404c.
4.
Self-organizing maps. Teuvo Kohonen, Helsinki, Finland, 2005.
– 496p.