Ленченкова Елена Павловна
Московский Государственный университет путей сообщения
(МИИТ), Россия
Применение мобильного
лазерного сканирования в проектировании железных дорог
Мобильное лазерное сканирование (МЛС) –
находящаяся на стадии становления технология, которая сочетает высокую скорость
получения результатов – точек лазерного отражения (ТЛО), точность данных
сканирования и их обширность. Лазерный сканер - геодезический прибор для
сканирования пространства лазерным пучком. Прибор устанавливается на
транспортное средство (в случае сканирования железнодорожной линии – локомотив
или мотрису) и по ходу движения получает геопространственные данные о местности
вдоль оси пути. Точность этих данных повышается за счет использования
инерциальной системы, которая корректирует смещения, возникающие за счет
вынужденных колебаний транспортного средства. Принципиальные отличия от
электронного тахеометра в том, что лазерный сканер не требует поиска и
визирования цели, а полученная информация записывается в накопителе
автоматически. Движение сканирующего прибора осуществляется по траектории,
совпадающей с осью участка пути, что и позволяет получить данные, необходимые
для процесса проектирования реконструкции или ремонтов железнодорожной линии.
Результат МЛС – облако точек с тремя пространственными координатами, плотностью
порядка 60 млн.точек на 1 км участка пути (рис.1) ([1]).
Проследование по участку железнодорожного
пути в прямом и обратном направлениях позволяет снизить количество «слепых»
зон, возникающих из-за частичного или полного заграждения видимости элементами
инфраструктуры а также из-за теней, отбрасываемых этими же элементами.
Полностью ликвидировать «слепые» зоны не представляется возможным, поэтому
возникает необходимость проведения традиционной тахеометрической съемки в
«теневых» областях.
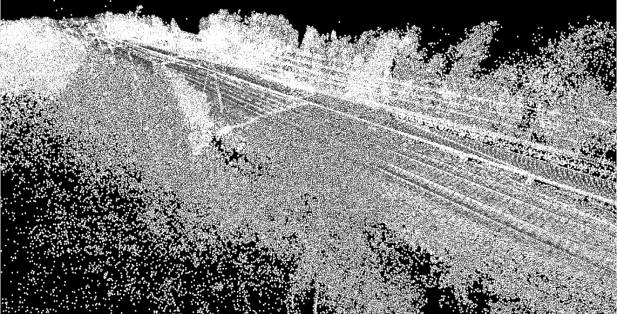
Рисунок 1 – Результаты мобильного лазерного сканирования
Скорость МЛС равна скорости транспортного
средства, что составляет около 60км/ч. А значит, за час можно получить облако
ТЛО тридцатикилометрового участка пути. Эти данные необходимо обработать
вручную, что и является самой трудоемкой и затратной по времени частью работы
метода. Современное программное обеспечение позволяет распознавать конфигурацию
сечения рельса и векторизовать рельсовую нить в уровне верха головки рельса
(рис.2). Таким образом определяется положения рельсовых нитей, а затем и оси
пути в пространстве.

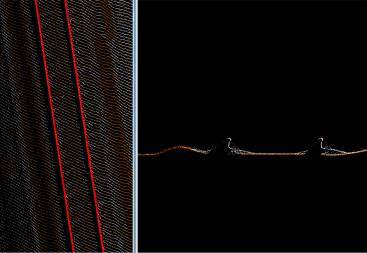
Рисунок 2 – Векторизация рельсовых нитей
Помимо этого современное программное
обеспечение позволяет для наглядности раскрасить облако ТЛО - выполнить заливку
по высотам точек, а также выделить часть точек, предположительно принадлежащих
земной поверхности и другими программными средствами сгенерировать из них
модель рельефа, например, методом триангуляции.
ЦМР и оси путей помогают в автоматическом
режиме создавать любые разрезы, поперечные и продольные профили, рассчитать
положение кривых и прямых участков плана линии (рис.3). На каждый поперечный
профиль могут быть наложены сечения ТЛО, что позволяет наглядно и точно
показать расположение опор ЛЭП и контактной сети
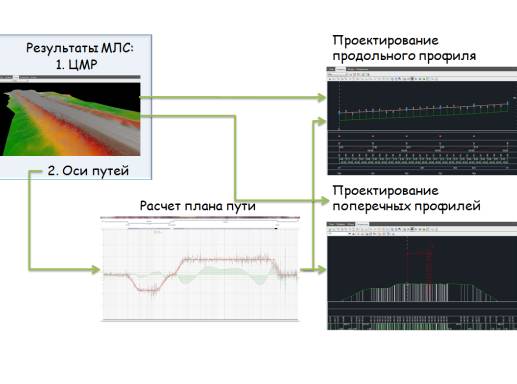
Рисунок 3 – Применение обработанных результатов МЛС
Из вышеизложенного следует сделать вывод
о ряде преимуществ мобильного лазерного сканирования перед тахеометрической и
другими видами наземной съемки:
·
высокая точность, в том числе и из-за
снижения влияния человеческого фактора на результаты;
·
обширные более детальные результаты;
·
скорость сбора данных;
·
мгновенная трехмерная визуализация,
которая позволяет представлять полную картину даже тому участнику
производственного процесса, который не присутствовал на месте проведения работ
(оснащение лазерного сканера цифровой камерой также способствует повышению
информативности результатов МЛС), в том числе и для контроля съемки,
выполненной электронным тахеометром;
·
безопасность при съемке труднодоступных и
опасных участков пути.
Недостатками МЛС являются:
·
высокая стоимость. Экономически
эффективно применение этого метода в случае больших объемов съемки одним
комплексом МЛС.
·
трудоемкость обработки результатов. Среди
путей устранения этого недостатка можно предложить разработку и программную
реализацию алгоритма, позволяющего автоматизировать обработку результатов МЛС и
снизить необходимость вмешательства человека в процесс обработки до минимума
или устранить эту необходимость.
Литература:
1.
http://www.cenews.com/article/8332/mobile-laser-scanning