Створення вимірювального роботу
К.т.н. Туз В.В., Ятел О.О.
Київський Національний університет технологій та
дизайну
Останніми роками при розробці систем управління об'єктами різного типу
і рівня складності усе більше уваги приділяється мікроконтроллерній техніці. Це
пов'язано з її бурхливим розвитком і широким асортиментом пропонованої
продукції. Використання мікроконтроллерів дозволяє конструювати пристрої, що
мають такі якості, як невеликі габарити, відносна дешевизна, простота і
надійність, сумісність з персональним комп'ютером через стандартні інтерфейси.
При розробці робота
виникає необхідність у виборі мікроконтроллера, що задовольняє вимогам по
продуктивності, надійності, умовам застосування, габаритним розмірам.
Для різного класу
роботів застосовуються різні типи мікроконтроллерів.
Існують такі типи
роботів: Промислово-індустріальні
роботи в останні десятиріччя майже повністю замінили людську працю в
різноманітних галузях, особливо в технологічних процесах, де потрібна
прецизійна точність, швидкість та одноманітність, повторюваність операцій - в
машинобудуванні та обробці металів, в виробництві мікропроцесорів і навіть в
таких галузях як виробництво або складання паперово-картонної тари; Бойовий
робот (або Військовий робот) — автоматичний пристрій, що може замінити людину в
бойових ситуаціях для збереження життя або для роботи в умовах підвищеної
складності для людей в військових цілях: розвідка, бойові дії, розмінування; Побутовий
робот - робот, призначений для допомоги людині в повсякденному житті. Зараз поширення побутових роботів невелика, проте футурологи передбачають
широке їх розповсюдження в найближчому
майбутньому.
Сучасні обчислювальні пристрої як широкого застосування, так і ті які
використовуються для управління бортовим або технологічним обладнанням,
будуються відповідно до одного з двох базових принципів - архітектури Фон
Неймана і Гарвардської архітектури. У основі кожної архітектури використаний
процесор - пристрій для обробки цифрових даних. Обмін інформацією між
процесором та іншими прибудовами в межах обчислювача здійснюється за розділами
паралельних провідників, названих шинами (bus) або магістралями передачі
інформації.
Типова структура
обчислювача на основі архітектури Фон Неймана представлена на рис. 1.1-а
(показані потоки передачі інформації, а не шини).
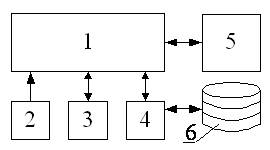
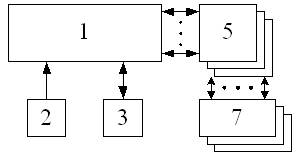
а) б)
Рис. 1. Структура
обчислювача на основі архітектури Фон Неймана (а) і Гарвардської архітектури
(б): 1 - процесорний блок; 2 - постійне запам'ятовуючий пристрій (ПЗП); 3 -
оперативний запам'ятовуючий пристрій (ОЗП); 4 - контролер зовнішніх
накопичувачів; 5 - порти введення - виводу; 6 - зовнішні дискові накопичувачі;
7 - пристрою сполучення з об'єктом (УСО).
Управління швидкістю
прийому і передачі даних здійснюється контроллером швидкості передачі, який є звичайним дільником частоти.
Швидкість передачі залежить від утримуваного регістра контролера. У моделях
AT90S/LS2333 і AT90S/LS4433 цей регістр являється 12 розрядним і фізично
розміщується в двох РВВ UBRRHI: UBRR, розташованих по адресах $03: $09 ($23:
$29). У інших моделях він розміщується в одному регістрі UBRR, розташованому за
адресою $09 ($29). Власне швидкість передачі визначається наступним вираженням:
![]() (1)
(1)
де BAUD — швидкість передачі (у бодах); fCLK — тактова частота мікроконтроллера,
Гц; UBR — вміст регістра контролера швидкості передачі (0.4095 для моделей
AT90S/LS2333 і AT90S/LS4433 і 0.255 для інших моделей).
Як відоме, існує ряд значень швидкості передачі даних, що являються, по
суті справи, стандартними. Значення регістра UBR, передачі, що дозволяють
отримати ці швидкості, при використанні різних резонаторів, а також величини
помилок значень, що набувають, відносно їх теоретичного значення.
Таким чином враховуючи вище сказане ми розробляємо структурну схему блоку
керування вимірювального робота, яка представлена на рис.2.
|
|
Рис. 2. Структурна схема блоку керування вимірювального робота
Для перевірки результатів використовувалося програмне
забезпечення Proteus 7 Professional Результати комп’ютерного моделювання
представлені на рис. 3. Для моделювання використовувався мікроконтролер
ATmega 16:
Ядро
мікроконтролерів AVR сімейства Mega виконано по вдосконаленої RіSC-архітектурі
(enhanced RІSC), у якій використається ряд рішень, спрямованих на підвищення
швидкодії мікроконтролерів.
Арифметико-логічний
пристрій (АЛУ), що виконує всі обчислення, підключено безпосередньо до 32
робочих регістрів, об'єднаним у реєстровий файл. Завдяки цьому, АЛУ може
виконувати одну операцію (читання вмісту регістрів, виконання операції й запис
результату назад у реєстровий файл) за такт. Крім того, практично кожна з
команд (за винятком команд, у яких одним з операндів є 16-бітна адреса) займає
одну комірку пам'яті програм.
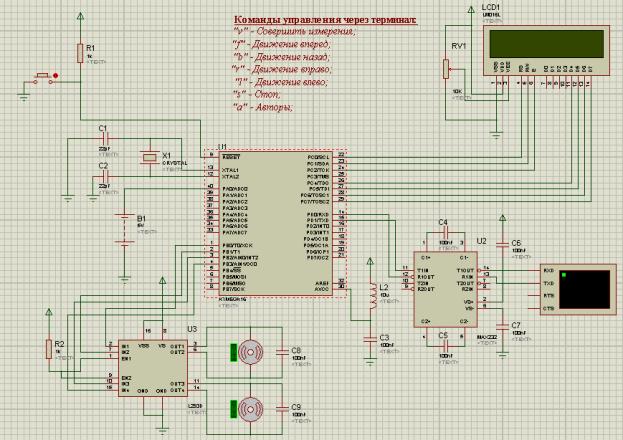
Рис. 3. Зовнішній
вигляд моделі
Висновки:
Розроблена структурна схема блоку керування вимірювального робота.
Розроблена комп’ютерна модель , що дозволяє промоделювати роботу
вимірювального робота та виключити недоліки при розробці роботів.
Вибраний мікроконтроллер задовольняє
усім системним вимогам.
Список використаних джерел:
1.
Программируемые роботы. Создаем
робота для своей домашней мастерской. / Дж. Вильямс - М.: Издательство ТРИУМФ, 2007
2.
Принцип
работы последвательного и параллельного интерфейсов./ Валерий Салычев – М.:
Позновательная книга плюс. 1996 г.
3.
Пожар
в долине. Пол Фрейбергер, Майкл Свейн. Изд. Дарнэл. 2000г.