УДК 621.01
Сазанбаева Р.Н., Кайнарбеков А.К., Сарыпбеков М.,
Сухамбаев А.К.
ИССЛЕДОВАНИЕ РАВНОМЕРНОСТИ ХОДА ШАГАЮЩЕГО ДВИЖИТЕЛЯ
Шагающий
движитель состоит из рамы 1 и шагающего колеса 2 (рис.1). Вес рамы 1 с
экипажной частью падает не на вал ступицы, как это принято, а на спицы через
ролики 2. На раме 1 выполнен кулачковый паз с вогнутой направляющей, компенсирующий величину вертикального
колебания ступицы колеса. При вращении ступицы колесо совершает вертикальное колебание. Частота этого колебания за один оборот колеса
равна числу спиц на ступице. В результате этого шагающее колесо отличается от колеса с ободом не только по
конструкции, но и еще по характеру движения. Поэтому представляет большой
интерес исследования истинного движения рамы шагающего движителя. В начале
все силовые и инерционные факторы приводится к шагающему колесу от рамы 1,
т.е.:
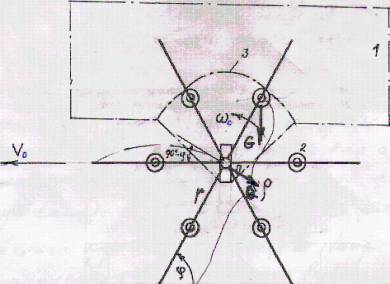
Рисунок 1
![]()
где: ![]() - кинетическая
энергия системы;
- кинетическая
энергия системы;
![]() - кинетическая энергия шагающего колеса;
- кинетическая энергия шагающего колеса;
![]() - кинетическая
энергия рамы.
- кинетическая
энергия рамы.
Причем
![]()
![]()
 Поэтому
Поэтому
![]()
![]()
Тогда уравнение движения шагающего колеса имеет вид:
![]() r … (1)
r … (1)
Умножим
обе части равенства на ![]() и получим:
и получим:
![]()
![]()
![]()
![]()
![]()
Или ![]()
![]()
![]()
![]()
![]()
![]()
После интегрирования:
![]() ,
,
Оттуда:
![]()
![]()
где ![]() - истинная угловая скорость колеса
- истинная угловая скорость колеса
![]()
![]() - угол поворота
колеса изменяется от
- угол поворота
колеса изменяется от ![]() до
до ![]()
![]()
![]() - момент на валу двигателя, считается постоянным
- момент на валу двигателя, считается постоянным
![]()
![]() - вес рамы с грузом, падающий на одно колесо
- вес рамы с грузом, падающий на одно колесо
![]()
![]()
![]()
![]() - заданная угловая
скорость колеса при анализе без учета действия сил (скорость кинематической
модели)
- заданная угловая
скорость колеса при анализе без учета действия сил (скорость кинематической
модели)
![]()
![]() - приведенная к
колесу масса системы
- приведенная к
колесу масса системы
Теперь силовые и инерционные факторы приведены от
колеса к раме, т.е.:

![]()
![]()
![]()
![]()
т.е.: ![]() т.к.:
т.к.: ![]()
Уравнение
движения имеет вид:
![]() (3)
(3)
Аналогично
преобразуем умножив на ![]() , т.е.:
, т.е.:
![]()
После
интегрирования:
![]() ,
,
![]()
![]() (4)
(4)
где V – истинная скорость рамы в м/c
![]() - угол поворота колеса изменяется от
- угол поворота колеса изменяется от ![]() до
до ![]()
![]() - скорость рамы первоначальная
- скорость рамы первоначальная
![]() - приведенная к раме масса
- приведенная к раме масса
Q- сила сопротивления рамы
![]() - движущая сила
привода (постоянная)
- движущая сила
привода (постоянная)
Причем
Qr = ![]()
Q=![]()
А
также
![]() .
.
Неравномерность хода рамы можно определить из
равенства:
![]() ;
;
![]()
![]()
![]() - коэффициент комфортности.
- коэффициент комфортности.
ЛИТЕРАТУРА
1.
Муратов А.М.,
Кайнарбеков А.К. и др. Шагающие
движители: Учебное пособие. Алматы, «Бастау», 2000г. 182с.
2.
Механика и управление
движением шагающих машин: Межвуз. сб. науч. тр. : [Материалы конф.: BЫП.1
Охоцимский Дмитрий Евгеньевич. - Волгоград: Волгогр. изд-во Упринформпечати. -
1990. - 157 с.