УДК
631.158:658.382.3:629.114.2
ОПРЕДЕЛЕНИЕ УСЛОВИЙ
ПЕРЕХОДА ОПАСНОЙ ЗОНЫ
И БЕЗОПАСНОГО
РАССТОЯНИЯ ПРИ ПОВОРОТЕ
МАШИННО-ТРАКТОРНОГО
АГРЕГАТА
Байтукаев У.Б.,
Жунусбаев Б.Ж.., Нусипжанов Н. С.
Казахский
национальный аграрный университет, г. Алматы, Республика Казахстан
Движущийся
на повороте тракторный агрегат создает впереди себя кольцевую опасную зону AДQ.C (рис. 1). Анализ травматических ситуаций по зонам
движения машинно-тракторного агрегата показал, что на нее приходится 16,9% несчастных случаев
[1]. Рассмотрим травматическую ситуацию, возникающую при переходе человеком
кольцевой опасной зоны, и условия перехода ее.
Агрегат
движется на повороте с радиусом R и скоростью ve . Человек переходит
опасную зону со скоростью v к центру из точки D и от центра поворота из точки Р. Для исследований рассмотрим наиболее
вероятную ситуацию, когда переход осуществляется под некоторыми углами α и ![]() к прямым, проходящим через центр поворота О,
т. е. в случае самого длинного
пути.
к прямым, проходящим через центр поворота О,
т. е. в случае самого длинного
пути.
Уравнения
движения человека в полярных координатах относительно агрегата во внутреннюю сторону
будут иметь вид:
ζ =R1-vּtcosα, (1)
![]() =
=![]() (2)
(2)
Преобразовав (1) и (2), получим:
![]() =
=![]()
 , (3)
, (3)
При
переходе опасной зоны во внешнюю
сторону поворота уравнение движения человека относительно агрегата будет иметь вид:
![]() =
=![]()
 , (4)
, (4)
где R1 и ![]() - внешний и внутренний радиусы опасной зоны.
- внешний и внутренний радиусы опасной зоны.
|
|
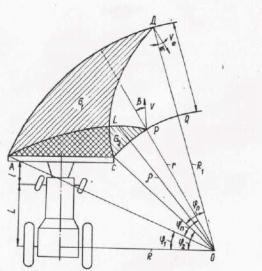
Рис.
1. Образование зон травма-
тической ситуации при движении
машинно-тракторного
агрегата на повороте
Кривая CD, выраженная уравнением (3), совместно с внешней стороной
опасной зоны AD и линией опасности AC ограничивает зону
возможной травматической ситуации δ1_ при переходе
человеком опасной зоны к центру поворота. Кривая АР,
выраженная уравнением (4), внутренняя сторона опасной зоны СР
и линия опасности АС образуют зону травматической
ситуации G2, возможную, при переходе человеком опасной зоны
от центра поворота. Проинтегрировав уравнения
(3) и (4), находим площади зон возможных травматических ситуаций, величина которых может являться одним из элементов показателя
травмоопасности агрегата.
Подставив вместо ζ в формулу
(3) величину ![]() , а в формулу (4) величину R1, получим значения конечных углов поворота агрегата в случае возможного выхода человека из опасной зоны:
, а в формулу (4) величину R1, получим значения конечных углов поворота агрегата в случае возможного выхода человека из опасной зоны:
![]() (5)
(5)
![]() (6)
(6)
где B1 =R1-![]() - ширина опасной зоны.
- ширина опасной зоны.
Зная значения этих
углов, можно вычислить безопасное расстояние от места нахождения человека до
линии опасности АС. Величины этих углов, а следовательно, и безопасное расстояние
зависят от ширины опасной зоны B1, скороcть движения агрегата - Ve, скорость перехода
человеком опасной
зоны- V, радиуса поворота
агрегата R, а также от направления
движения человека в опасной зоне, определяемого углами α и β.
Расчеты
показали, что существует оптимальное
направление
перехода человеком опасной зоны. Так, для агрегата с параметрами R=9
м, α =3
м, ![]() =2м, Ve = 2 м/с, V =1 м/с общий вид уравнений величины оптимальных углов направления
выхода определяется по формулам:
=2м, Ve = 2 м/с, V =1 м/с общий вид уравнений величины оптимальных углов направления
выхода определяется по формулам:
α0=arcsin![]() ,
(7)
,
(7)
α0=arcsin![]() , (8)
, (8)
полученным после исследования уравнений (5)
и (6) на минимум.
Из формул (7)
и (8) видно, что оптимальные углы перехода опасной зоны зависят от
скорости перехода человеком опасной зоны, скорости движения агрегата, а также от радиуса поворота
агрегата и радиусов, ограничивающих опасную зону. Однако в реальных условиях
трудно определить точное оптимальное направление движения человека (углы α0 и β0). В данном случае для расчетов рекомендуется использовать
секторы перехода опасной зоны, для которых α = 0-57 град, β = 0-35 град
(рис. 2).
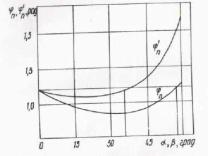
Рис.2. Определение секторов перехода опасной зоны
|
|
Определим минимальные
безопасные расстояния до линии опасной зоны при переходе ее человеком от центра поворота CP=lb и при движении человека к центру
поворота AD=lH которые соответственно будут равны:
l=φb.![]() ; lH= φH .R1
; lH= φH .R1
Согласно
выражениям (5) и (6), а также рис. 1,
φb =φ1n-![]() φ; φH =φn+
φ; φH =φn+![]() φ,
φ,
где
![]() φ=φ2-φ1+
φ=φ2-φ1+![]() φ,
φ,
|
|
Используя полученные
зависимости и построив номограмму,
можно определить безопасные расстояния при любых параметрах
машинно-тракторного агрегата
(рис. 3).
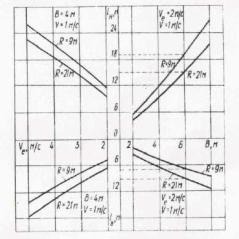
Рис.3 Номограмма
для практического определения
расстояний
при любых параметpax
машинно-тракторного агрегата
Из номограммы видно, например, что при ширине агрегате 6 м, скорости движения
агрегата 2 м/с, человека -1 м/с и радиусе поворота 9 м
безопасное расстояние при переходе опасной зоны от центра
поворота агрегата будет равно б,75 м, а при
переходе к центру попорота
- 18,73 м.
Полученные данные
можно применять при составлении правил и инструкций по
технике безопасности для проведения инструктажей при
работе на машинно-тракторных агрегатах, а также для
более объективной оценки причин
несчастных
случаев.
Литература
1.
Гарбар В.А. Травматизм
по зонам опасности тракторного агрегата. М., 1999г.
РЕЗЮМЕ
Определены условия
перехода опасной зоны и безопасного расстояния при повороте машино-тракторного
агрегата для проведения профилактических мероприятий по предотвращению
несчастных случаев и их объективной оценке.
Жазатайым жағдайларды объективті бағалау және оларды
алдын алу мақсатында мәшіне-тракторлық тіркеме
бұрылғанда қауыпты аймақты өту шарты және
қауыпсіз қашықтығы анықталған.
Conditions of dangerous zone passage and accidents distant on
machine-tractor turning are determined. They are employed to prophylactic
actions warding off unlucky accidents and its objective estimations.