Ющенко
О.А., Кусайнов Р.Р.
Карагандинский
государственный индустриальный университет,
Казахстан
Исследование
работы нечеткого ПИД-регулятора
В настоящее время в промышленности,
несмотря на большое количество разработок в области адаптивного и оптимального
регулирования, управление технологическими процессами в подавляющем большинстве
случаев осуществляется с помощью ПИД-регуляторов. Однако системы управления,
построенные на таких принципах, являются детерминированными и не учитывают нелинейность
реальных объектов управления в указанной области [1]. Это приводит к снижению
качества регулирования, увеличению времени и затрат на производство продукции.
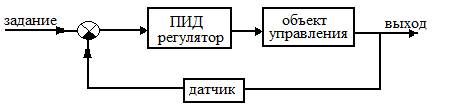
Рисунок 1. Схема управления на
основе ПИД-регулятора
Поэтому достаточно активно ведутся
исследования по модернизации представленной схемы управления, особенно в части
регулятора. Существуют как схемы адаптивного управления, где данная
адаптивность вносится как классическими методами, так и интеллектуальными, так
и схемы, где регулятором выступает некоторая интеллектуальная система
(нейронная сеть, нечеткая логика) [2].
Существуют два основных метода
построения нечетких систем: Мамдани-Заде и Сугено-Такаги-Канга. В данной статье будет рассмотрен
первый из них.
Построение
системы нечеткого вывода включает в себя два этапа:
-
определение функций принадлежности переменных;
-
составление базы правил.
Общий
логический вывод осуществляется за следующие пять этапов [3]:
В MATLAB разработан модуль fuzzy, обладающий
интуитивно-понятным интерфейсом [4].
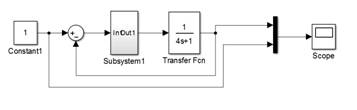
Рисунок 2. Модель системы управления
на основе нечеткого ПИД-регулятора
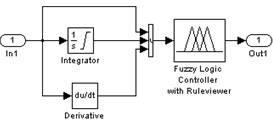
Рисунок 3. Блок регулятора
Командой fuzzy в окне MATLAB вызываем окно редактора фази-инференционной системы (Fuzzy
Inference System Editor), выбираем тип системы - Мамдани,
задаём три входа - для пропорциональной, интегральной и диффиренциальной
составляющих и называем входные переменные P , I и D, а выходную - Out. Первоначально следует построить
функции принадлежности входных и выходных переменных и правила нечеткого логического
вывода [5].
Для описания переменных
P,
I,
D выберем 3 треугольника (N, Z, P), для описания выходной переменной
Out
выберем 7 треугольников (NL,
NM,
N,
Z,
P,
PM,
PL).
В этом же окне зададим диапазоны изменения переменных: Р – [-1, 1]; I – [-1 1]; D – [-1 1]; Out – [0 2] [6].
Следующим шагом
необходимо задать лингвистические правила.
Чтобы предупредить
увеличение сигнала рассогласования выходной сигнал регулятора должен
увеличиваться при положительном значении скорости, и наоборот.
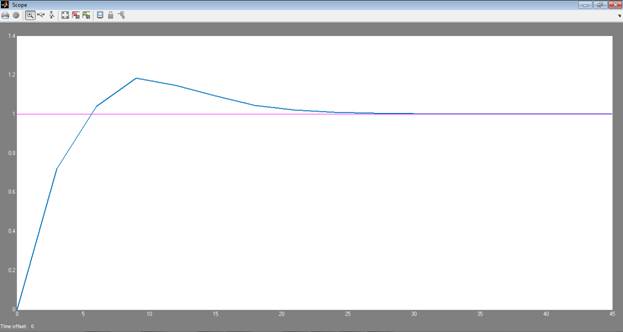
Рисунок 4. График переходного
процесса с нечетким ПИД-регулятором
Таким образом, из результатов
моделирования очевидно, что процесс устанавливается на заданном значении с
небольшим перерегулированием.
Литература:
1. Аббасов И.Б. Двухмерное и трехмерное моделирование в 3ds
MAX / И.Б. Аббасов. - М.: ДМК, 2012. - 176 c.
2. Авдеев
В. Компьютерное моделирование цифровых устройств / В. Авдеев. - М.: ДМК, 2012.
- 360 c.
3. Агравал Г.П. Системы автоматического управления: теория,
применение, моделирование в MATLAB: Учебное пособие / Г.П. Агравал.
- СПб.: Лань, 2013. - 208 c.