Математика/5.
Математическое моделирование
,
Действительный член, профессор Российской Академии
Естествознания (РАЕ), Почетный доктор
наук (РАЕ), Заслуженный работник науки и образования,
к.т.н., доц. Буянкин В.М.
Московский Государственный технический
университет имени. Н.Э. Баумана, Россия
Заслуженный работник науки и образования ( РАЕ), кан. физ-мат. наук ВАК РФ. Ковалева С.К.
РНЦ ” Курчатовский институт”
Моделирование
системы нейросамонастройки токового
контура электропривода
В статье рассматриваются вопросы синтеза нейрорегуляторов для систем управления электроприводами.
Анализируются устойчивая работа и особенности применения нейрорегуляторов в замкнутых
контурах. Нейрорегуляторы
самонастраиваются при изменении параметров обьекта управления. Информация об
изменении параметров обьекта управления сравнивается с оптимальными желаемыми
характеристиками эталонной модели, вырабатывается сигналы обучения для
нейрорегуляторов, которые обеспечивают необходимые оптимальные статические и динамические характеристики
электропривода
Рассмотрим одноконтурную систему управления токовым контуром электродвигателя постоянного тока ПБСТ-22 с номинальными параметрами P=0,6кВт,
U= 110 В, I=7А, n=1000 об/мин, которая представлена на рис. 1
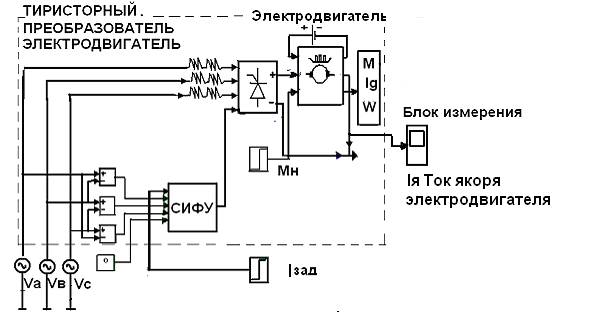
Рис. 1. Функциональная
схема управления токовым контуром
электродвигателем в среде MATLAB
Работу электропривода изображенной
на рис. 1 можно описать системой линейных и нелинейных уравнений:
![]() – Уравнение обмотки
возбуждения
– Уравнение обмотки
возбуждения
![]() – Уравнение обмотки
якоря
– Уравнение обмотки
якоря
![]() – Уравнение моментов
на валу электродвигателя
– Уравнение моментов
на валу электродвигателя
(1)![]()

![]() – Уравнение
тиристорного преобразователя,
– Уравнение
тиристорного преобразователя,
где ![]() – напряжение в
обмотке возбуждения,
– напряжение в
обмотке возбуждения,
![]() – ток возбуждения,
– ток возбуждения,
![]() – активное
сопротивление обмотки возбуждения,
– активное
сопротивление обмотки возбуждения,
![]() – индуктивность обмотки возбуждения,
– индуктивность обмотки возбуждения,
![]() – магнитный поток
обмотки возбуждения,
– магнитный поток
обмотки возбуждения,
![]() – напряжение на
якоре,
– напряжение на
якоре,
![]() – ток якоря,
– ток якоря,
![]() – ЭДС якоря
– ЭДС якоря
![]() – активное
сопротивление якоря,
– активное
сопротивление якоря,
![]() – индуктивность якоря,
– индуктивность якоря,
J – момент
инерции,
w – частота
вращения электродвигателя,
М
– вращающий момент электродвигателя,
![]() – момент нагрузки,
– момент нагрузки,
![]() – коэффициент ЭДС
электродвигателя,
– коэффициент ЭДС
электродвигателя,
![]() – коэффициент момента
электродвигателя,
– коэффициент момента
электродвигателя,
![]() – амплитудное
значение напряжения,
– амплитудное
значение напряжения,
![]() – угол поджигания
тиристоров.
– угол поджигания
тиристоров.
При помощи
MATLAB с использованием выше описанной функциональной схемы электропривода можно
смоделировать переходные процессы тока в токовом контуре при различных
параметрах электродвигателя, которые
описываются разностным уравнением.
![]() (2)
(2)
Разработаем и обучим нейронную сеть для нейроиденгификации переходного процесса тока в электродвигателе,
изображенной на рис. 2 Нейронная сеть имеет
четыре нейрона во входном слое и один нейрон на выходе и описывается следующей
системой уравнений:
![]() – Выходной сигнал
нейронной сети, задержанный на один
такт
– Выходной сигнал
нейронной сети, задержанный на один
такт
 (3)
(3)
–Уравнения первого входного слоя
нейронной сети
![]() – Уравнение
второго выходного
– Уравнение
второго выходного
слоя нейронной сети
![]() -Выход нейронной
сети
-Выход нейронной
сети
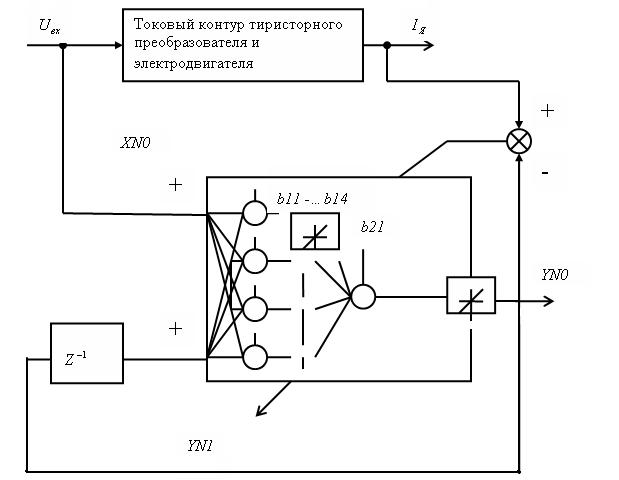
Рис. 2. Схема обучения нейронной сети
В результате обучения переходной процесс нейронной сети с необходимой
заданной точностью повторяет переходной
процесс тока, что позволяет сделать вывод об успешном решении задачи нейроидентификации.
Проведем нейросамонастойку в токовом контуре электропривода.
Структурная
схема контура нейросамонастройки с блоком
нейроидентификации представлена на рис. 3
.
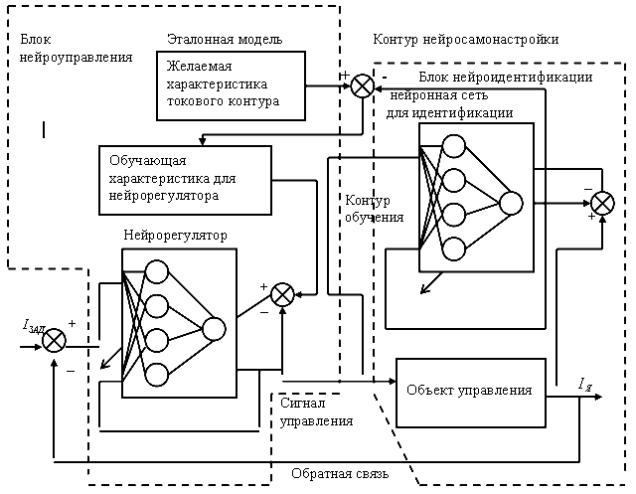
Рис. 3. Структурная схема контура нейросамонастройки
Контур нейросамонастойки состоит
из эталонной модели с желаемыми характеристиками токового контура. Желаемый
выходной сигнал описывается следующим разностным уравнением
![]() (4)
(4)
Данные блока
нейроидентификации сравниваются с данными эталонной модели, в результате
сравнения получаются сигналы обучения для
нейрорегулятора.
Нейрорегулятор рис. 4 имеет
интегрально-пропорциональную структуру для выполнения роли компенсации
электромагнитной постоянной времени электродвигателя, что существенно улучшает
статические и динамические характеристики токового контура.
Уравнения ПИ- нейрорегулятора имеют следующий вид:
![]()
![]() – сигнал на входе
нейронной сети
– сигнал на входе
нейронной сети
![]() – Сигнал на входе
нейронной сети, задержанный на один такт
– Сигнал на входе
нейронной сети, задержанный на один такт
![]() – Сигнал на выходе
нейронной сети, задержанный на один такт
– Сигнал на выходе
нейронной сети, задержанный на один такт  –Уравнения первого входного слоя
–Уравнения первого входного слоя
нейронов
 –Уравнения второго выходного
–Уравнения второго выходного
слоя нейронов
(5)
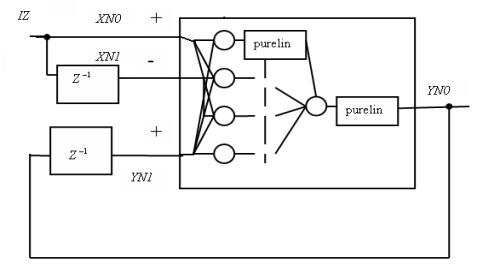
Рис. 4. ПИ- нейрорегулятор
Работа ПИ- нейрорегулятора в виде разностного уравнения имеет вид:
![]() ,
(6)
,
(6)
где
При разных индуктивностях и сопротивлениях якоря электродвигателя было получено семейство обучающих
характеристик для ПИ- нейрорегулятора. В
результате обучения нейрорегулятора
токовый контур с нейросамонастройкой имеет переходной процесс совпадающий с
желаемым переходным процессом эталонной модели. При изменении параметров электродвигателя
блок нейроидентификации отслеживает эти изменения, сравнивает их с параметрами эталонной модели и вырабатывает
обучающие характеристики для нейрорегулятора.
В итоге переходной процесс токового контура при переменных и нелинейных
параметрах электродвигателя остается как и прежде без изменений рис. 5.
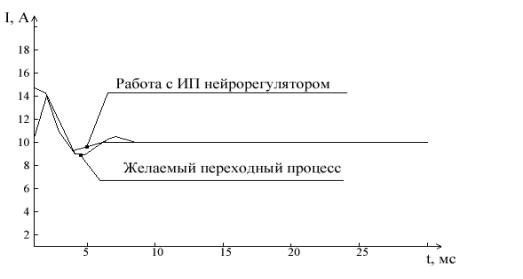
Рис. 5. Переходные процессы изменения тока якоря электродвигателя
в токовом контуре
Выводы
Таким образом система управления с нейроидентификацией с нейросамонастройкой
и нейрорегулятором обеспечивает оптимальные статические и динамические
характеристики работы электропривода при переменных и нелинейных параметрах электродвигателя.
Литература
1. Буянкин В.М.
Интегральный, пропорциональный, дифференциальный нейрорегулятор. Вестник МГТУ
им. Н.Э.Баумана, серия фундаментальные науки 2006 г.N3(64)
2. Буянкин
В.М. Идентификация нейронной сетью
электродвигателя постоянного тока в среде Matlab simulink Вестник МГТУ им.
Н.Э.Баумана, серия приборостроение
2006 г.N3(22)
3. Буянкин В.М
Нейроидентификация нейросамонастройка в электроприводе
Журнал
«Нейрокомпьютер» 2006 г.N9
4.Буянкин
В.М.,.Захаров В.Г Физические процессы нечеткого управления при
обучении нейрорегуляторов токового контура электропривода с мягкими
вычислениями Вестник МАДИ ГТУ N7