Маногаров А.И., Мамелин
Ю.В., Омельченко А.Н., к.т.н. Парфенова И.А., Рудоман А.Н., Рудоман Н.Р., Цой
Д.Д.
Кубанский
государственный университет, Россия
Схема автономного робота на трех датчиках и ячейкой памяти для следования
по линии
Схема позволяет роботу следовать по линии, а
ячейка памяти запоминает, в какую сторону произошел съезд. Затем включается
соответствующий двигатель и возвращает
робота на линию. Фотодатчики собраны из фототранзисторов и светодиодов
ИК-диапазона. Они являются зрением робота, которое позволяет увидеть линию под
роботом. На резисторах R2, R7, R10 и фототранзисторах BL1–BL3 (рис. 1)
выполнены три одинаковых пороговых схемы, сопротивление которых в точке
соединения изменяется в зависимости от уровня освещенности фототранзисторов.
Подсветка осуществляется ИК-светодиодами HL1–HL3, включенными через
токоограничительные резисторы R1, R5, R8. С помощью подстрочного резистора R12
устанавливается яркость свечения всех светодиодов HL1–HL3 одновременно.
Когда робот находится на лини строго по центру, два крайних его фототранзистора
BL1, BL3 освещены отраженным
излучением светодиодов, а центральный фототранзистор BL2 не освещен, так как
излучение от светодиода HL2 не отражается от
черной линии. С коллекторов фототранзисторов сигнал идет на резистор и на входы
микросхемы DD1, где формируются из входных перепадов напряжений сигналы
прямоугольной формы, и происходит восстановление сигнала до напряжения питания.
На выход установлены индикаторные светодиоды HL1–HL3, чтобы во время
экспериментов и настройки робота была возможность определять состояние фотодатчиков. Сигнал с центрального
фотодатчика используется только для переключения управления двигателями М1, М2.
Сигналы с крайних фотодатчиков (левого HL3, BL3 и правого HL1, BL1)
используются для включения/выключения правого и левого двигателей
соответственно, а также для формирования состояния триггерного элемента DD1.5
и DD1.6. Начальное состояние триггера не имеет значение, так как
сход с линии автоматически переключает триггер в «нужное» состояние. Микросхема
DD2 играет роль коммутатора и управляется транзистором VT1 и сигналами с
выходов 10, 12 триггера. Когда робот находится строго на линии, на выходах
элементов микросхемы DD1.1–DD1.3
будет: на выходах 2 и 6 лог 1= +Uпит , а на выходе 4 будет
лог 0 = –Uпит . Низкий уровень с выхода 4 пройдет через диод VD1 на базу транзистора VT1 и откроет его. В
результате на коллекторе транзистора VT1 установится положительный
потенциал. Поступая на входы управления элементами DD2.1 и DD2.3, потенциал
открывает их. В результате через элементы DD2.1, DD2.3 сигналы с выходов DD1.1,
DD1.3 беспрепятственно проходят к затворам полевых транзисторов VT2, VT3.
А так как оба сигнала высокого уровня, то полевые транзисторы открываются,
подключая двигатели к источнику питания, робот едет вперед по линии. Если
робот сошел с линии вправо, так, что правый и средний датчики оказались над
былым полем, а левый фотодатчик сместился к черной полосе и находится над ней.
В этом случае транзистор VT1 открыт низким уровнем через диод VD2. На
коллекторе транзистора VT1 высокий уровень, поэтому включены элементы
DD2.1, DD2.3. Высокий уровень с выхода 4 элемента DD1.2 запирает
диод VD1. А высокий уровень с выхода 2 DD1.1 беспрепятственно
проходит через вывод 1 элемента DD2 на затвор полевого
транзистора VT3 и открывает его. В этом случае двигатель М2 начинает
работать, а М1 переходит в выключенное состояние, робот будет поворачивать
влево, возвращая центральный датчик строго на линию. В этот момент включается
правый двигатель, и робот начинает движение прямо. Аналогичные действия
происходят, если робот съедет с линии влево, только в этом случае включается
левый двигатель, а правый останавливается. Триггер на элементах DD1.5, DD1.6
запоминает положение робота относительно линии и реагирует, благодаря диодам
VD4, VD5 только на отрицательные перепады напряжения. Рассмотрим ситуацию,
когда робот полностью съезжает с линии вправо. До того момента, как робот
съедет с полосы, левый фототранзистор BL3, находясь некоторое время над
полосой, сформирует положительный потенциал, который будет инвертирован
элементом DD1.3. Триггер на элементах DD1.5, DD1.6 переключается
низким уровнем, поступающим через диод VD5. При этом на его выходе 12 элемента
DD1.6 установится высокий уровень. Этот уровень поступит к закрытому
пока входу 11 элемента DD2.4.
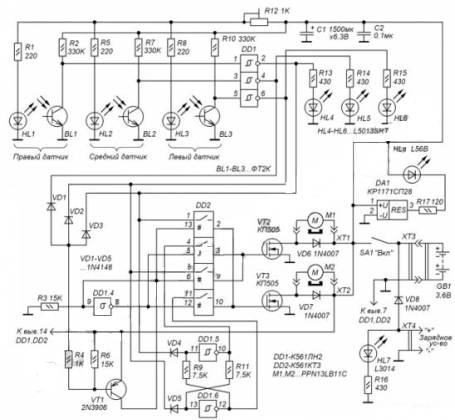
Рисунок 1
– Электрическая схема
Схема полностью
функционирует и была реализована на робототехнической автономной платформе (Litllebot),
которая на научно-практических соревнованиях в Кубанском государственном
университете проехала трассу за 23
секунды, что очень хорошо по сравнению с предыдущими роботами с похожей
логикой. Недостатки схемы: оптимальное Uпит=3,6В, что не
позволяет увеличить скорость данного робота, фотодатчики (большая
чувствительность). Преимущества: малые размеры, способность запоминать
последний поворот, высокая скорость получения сигналов. Планируется
модифицировать схему, увеличив Uпит с 3,6 до 7,2–9 В,
подобрать наиболее подходящие элементы, оптимальные размеры платформы и
расположение моторов с целью лучшей проходимости поворотов, продумать защиту от
воздействия внешнего воздействия ИК-излучения.